
Los Sistemas Inteligentes de Transporte (ITS) son un producto de la revolución de las tecnologías de la informática y las comunicaciones en la era digital. Actualmente, ITS asiste a la operación de las redes de transporte integradas entre caminos, líneas ferroviarias, vías marítimas, puertos y aeropuertos. ITS también ayuda al control de los vehículos que circulan por esas redes y a la planificación eficiente de las operaciones del transporte que usan esos vehículos (incluyendo la planificación particular de viajes y la logística de flotas de vehículos).
Los Sistemas inteligentes de Transporte incluyen un amplio rango de funciones de ayuda al usuario, que van desde una simple información de alerta desde un teléfono móvil hasta sistemas sofisticados de control de tránsito. Para lograr sus funciones, ITS utiliza un amplio rango de tecnologías disponibles, a saber:
En el núcleo de cualquier Sistema Inteligente de Transporte están los conceptos gemelos de tecnologías de control y de información. Las tecnologías de control soportan muchas aplicaciones ITS y pueden ser divididas en dos grandes categorías:
Por el lado de la información, las tecnologías son necesarias para adquirir, procesar y fusionar datos, darle sentido a esos datos y difundir la información a los usuarios – incluyendo al público que está viajando. La información recolectada y procesada puede también ser usada para implementar medidas de gestión y control destinadas a la mejora de la performance de la red. Las tecnologías ITS disponibles también recolectan datos del tránsito y del medioambiente en tiempo real desde el campo y transfieren los datos recolectados a una localización central donde los datos son procesados, fusionados, analizados y utilizados para ayudar en la toma de decisiones.
Al igual que las tecnologías de control, las tecnologías de detección se dividen en dos grupos:
El requisito fundamental de los Sistemas Inteligentes de Transporte son los datos y la información acerca de la red de transporte (rutas y autopistas). Los datos deben ser confiables, actuales, legibles, accesibles y los suficientemente exhaustivos para propósitos de planificación y operación. Ésto es la “info-estructura” de la cual dependen muchas aplicaciones ITS. Los datos básicos están usualmente georreferenciados y mantenidos en formato digital tal como una base de datos de enlaces entre caminos que conectan sitios conocidos o nodos sobre la red - cada uno con una única referencia. (Ver Procedimientos de Planificación)
Como mínimo, la información de la red consistirá en un “nomenclador" (o índice) que mantiene los códigos y breves descripciones de los enlaces viales, nodos y otras sitios, tales como:
Un nomenclador de la red puede proveer una base para la base de datos de navegación si es lo suficientemente detallado. (Ver Navegación y Posicionamiento)
El tipo de inventario requerido para el equipamiento y activos ITS implementados a lo largo de una red será determinado, en gran medida, por los requerimientos operacionales locales y por las aplicaciones ITS a ser mantenidas y soportadas. La información acerca del equipamiento ITS y su localización requerirá alguna forma de sistema de gestión de datos y un método apropiado de localización georrefrencial para asistir a la representación espacial de la información. Los Sistemas de Gestión del Mantenimiento (MMS) y los Sistemas de Gestión de las Comunicaciones (CMS) son bases de datos relacionales que pueden ser utilizadas para mantener un inventario de equipamiento ITS y la infraestructura asociada de comunicaciones. Algunas veces, se incluyen un sistema de monitoreo de la performance y/o un sistema de detección de fallas. Éstos monitorean aspectos críticos de la performance de equipamientos o de sistemas y emiten alertas al contratista de mantenimiento cuando se detectan fallas. Estos equipamientos de supervisión pueden del tipo de Unidades Remotas de Monitoreo (OMUs) o de Sistemas de Monitoreo de Performance (PMS).
Partiendo de la base de la descripción de la red y utilizando cualquier sistema de localización referencial, una multiplicidad de datos contribuirá a la base de inteligencia para las Operaciones de la Red Vial. Ellos incluyen, para cada enlace vial:
La base de inteligencia vial necesita ser mantenida en tiempo real y actualizada, teniendo en cuenta cualquier modificación insignificante a la red vial, la cual puede ser:
Donde las operaciones viales sean bien desarrolladas, una exhaustiva base de datos servirá para prever el impacto sobre la capacidad de la red ante futuros eventos. Ésto requerirá consultas con los grupos clave de interés tales como las autoridades locales y los servicios de emergencias. (Ver Planificación e Informes)
Otras capas de información de la red vial serán generadas por los sistemas de monitoreo del tránsito. Los datos provenientes del monitoreo del tránsito tienen tres funciones principales en las operaciones de la red vial:
Estas funciones básicas serán desempeñadas por la información disponible desde una variedad de fuentes y será necesario un enfoque sistemático del monitoreo del tránsito. Un enfoque planificado y ordenado es esencial, especialmente si los datos serán utilizados para:
Los sistemas automáticos de monitoreo del tránsito proveerán datos en tiempo real de volúmenes y velocidades vehiculares, tiempos de viaje punto a punto y, en algunos casos, clasificación de vehículos. Estos datos necesitan tener una referencia temporal y ser almacenados con una alusión al(los) enlace(s) con los cuales están relacionados, en conjunto con el registro de la fuente de datos. (See Tránsito & Monitoreo de Estado)
Los modelos computarizados de la red vial son utilizados para diagnosticar futuras condiciones del tránsito y predecir tiempos de viaje. La modelización hace uso de datos de las características de los enlaces, capcidades de las intersecciones y si los datos de tránsito y relativos a incidentes están disponibles – los cuales pueden ser dinámicos en tiempo real o históricos. Las estimaciones del modelo pueden ser comparadas con los resultados del monitoreo del tránsito para asistir a su calibración y validación. Un modelo de red puede también ser usado para diagnosticar los efectos de una dada estrategia de gestión del tránsito e identificar los beneficios potenciales de esa estrategia comparada con el escenario de "no hacer nada" o con un plan de respuesta alternativo. La modelización puede también realizar evaluaciones de riesgos o puebas de sensibilidad alrededor de difrenetes planes de respuesta.
La modelización de la red es capaz de entregar una gestión estratégica del tránsito más eficiente mediante la validación de la toma de decisiones y mediante la provisión de mejor información para objetivos de planificación de la gestión de la red vial. También puede ayudar a proveer mejor información de viaje a los usuarios del camino, tales como más precisos tiempos de viaje y diagnósticos de las condiciones del tránsito. (See Modelos de Tránsito)
Diferentes métodos son utilizados para proveer información de la localización dependiente de la tecnología que esté disponible y la precisión requerida. Muchos países han establecido un sistema nacional de referencia en red el cual necesita ser interpretado para dar las coordenadas de latitud y longitud globales. Ejemplos de localización referencial incluyen el posicionamiento global y el Canal de Mensajes de Tránsito del Sistema Radial de Datos (RDS-TMC).
Posicionamiento Global (Latitud/Longitud)
Los Sistemas de Posicionamiento Global (GPS) proveen un medio para la determinación de la localización de un objeto, en términos de latitud y longitud, basados en señales recibidas desde múltiples Sistemas Automáticos de Navegación Satelital (GNSS) – por ejemplo, los satélites GPS a los sitios de los receptores GPS. Además de la localización, el GPS puede ser utilizado para seguir vehículos y puede proveer una gestión económica de flotas y un monitoreo del itinerario de un vehículo a lo largo de su ruta.
Canal de Mensajes de Tránsito del Sistema Radial de Datos (RDS-TMC)
Algunos países – mayoritariamente en Europa – han invertido en la localización referencial vía radio digital, conocido como el Canal de Mensajes de Tránsito (Traffic Message Channel - TMC). Usando la tecnología del RDS-TMC sólo 16 bits datos (la unidad más pequeña de datos en computación) son asignados a una codificación de localización. Ésto significa que las tablas de código de localización RDS-TMC están solamente disponibles para referenciar uniones significativas de autopistas (nodos) y longitudes viales. (enlaces). (Ver http://en.wikipedia.org/wiki/Traffic_message_channel)
Los sistemas ITS típicamente usan múltiples servidores para las diferentes aplicaciones, estaciones de trabajo y pantallas de video en centros de control de tránsito. El hardware juega un rol principal en cualquier sistema ITS. Es responsable por:
En cuanto al hardware, algunas aplicaciones ITS (tales como los sistemas de gestión de incidentes y de autopistas) típicamente incluyen pantallas gráficas en el centro de control para proveer una descripción visual de las operaciones de los sistemas de transporte, capturadas por las videocámaras en el campo.
Los gráficos pueden verse en los monitores de la estaciones de trabajo de la sala de control o en grandes pantallas en la forma de un video wall. Estas pantallas proveen una ventana principal ( o vista) del sistema de gestión de tránsito – y están usualmente basadas en una representación gráfica o mapa de la red de autopistas. Ellas muestran los activos disponibles para el monitoreo de la red y el control del tránsito, tales como las señales y los VMS´s, y la localización de los Teléfonos Viales de Emergencia (ERTs o Postes SOS) y las videocámaras CCTV.
Software and relational databases are required for ITS technologies to store, manage and archive network data. These are brought together as Archived Data Management Systems (ADMS) or what is sometimes called ITS Data Warehouses. ADMS offers an opportunity to take full advantage of the travel-related data collected by ITS devices in improving transport operations, planning and decision-making at minimal additional cost.
The technologies supporting ADMS are designed to archive, fuse, organise and analyse ITS data and can support a wide range of very useful applications such as:
The figure below shows an example of the system architecture designed for a simple ITS Data Warehouse being developed for the Buffalo-Niagara region in New York State USA. At the core of the system is a relational data base (such as Oracle or MySQL) which receives data from a wide range of sources including real-time traffic data (volumes, occupancies and speed), incident information, travel time and delay information, weather data, construction and work-zone information, and transit data (such as automatic vehicle location data). The relational database organises and fuses the data and information together – linking the different data streams through common identifiers – allowing a wide range of applications to be developed and deployed.
")
System architecture designed for a simple ITS Data Warehouse (Buffalo-Niagara Region New York State USA)
Among the data stored in ADMS are transport system inventory data, which can be used to facilitate the construction of detailed network models and traffic simulation models. Every link and associated junction in the network will need to be classified according to its strategic importance and capacity. Many ADMS are provided with functionalities that can convert the stored data into the required format for running different traffic simulation and analysis software.
A key benefit of having an ADMS is the ability to quantify network conditions in terms of travel times, speeds and traffic volumes. These measures, based on real-time traffic data, can be used to provide dynamic status information of prevailing network conditions and the “level of service” offered to road-users. Historical data of this kind, including information for incident detection and management and for traffic modelling, can also provide the basis for traffic forecasting and predictive information.
Tree-building algorithms:
Almost all ADMS now include a web-based graphical interface to support users’ queries. The interface is commonly based on Geographic Information Systems (GIS) technology. GIS comprise a set of computer software, hardware, data, and personnel – that store, manipulate, analyse, and present geographically referenced (or spatial) data. GIS can link spatial information on maps (such as roadway alignment) with attribute or tabular data. For example, a GIS-digital map of a road network would be linked to an attribute table that stores information about each road section on the network. This information could include items such as the section ID number, length of section, number of lanes, condition of the pavement surface, or average daily traffic volume. By accessing a specific road segment, a complete array of relevant attribute data becomes available.
The Graphical User Interface (GUI) shown in the ADMS architecture diagram above shows that the data archived in the ADMS can be accessed by different stakeholders over the Internet. Custom applications and reporting functions may be designed including performance measurement, predictive traveller information, traffic simulation model development support, and many other applications.
One of the primary functions of a road or highway network is to allow the safe passage of people and goods from their origin to their destination. Traditional sources of information (printed road maps, direction signs, route listings and journey plans) all have their place but satellite navigation systems are now used widely. Generically these are known as Global Navigation and Satellite Systems (GNSS). Specifically, they include the Global Positioning System (GPS) developed by USA, GLONASS, the Russian global satellite navigation system and GALILEO, the civilian global satellite navigation system being developed by the European Union from its precursor, the European Geostationary Navigation Overlay Service (EGNOS) (See Video).
The USA’s GPS consists of 24 satellites that are deployed and maintained by the US Department of Defence (USDoD). Originally, the system was used solely for military purposes, but since 1983 the USA has made GPS available for civilian purposes. For location determination (longitude, latitude, and elevation), a GPS receiver needs to receive signals from at least four satellites (signals from the fourth satellite are needed to correct for errors and improve accuracy).
A GPS on-board a vehicle – or a smart-phone with a GPS – can determine the location of the vehicle. The location can then be communicated via wireless communication to a central location (such as a traffic operations centre) for processing and data fusion. Besides pinpointing the location of a vehicle and communicating that location to a traffic operations centre, GPS receivers are at the core of all navigation-aid devices developed by companies such as Garmin, TomTom, and Magellan. For navigation and turn-by-turn directions, accurate digital maps are needed, in addition to the GPS receiver.
For its operation, the USA’s GPS relies on signals transmitted from the 24 satellites orbiting the earth at an altitude of 20,200 km. GPS receivers determine the location of a specific point by determining the time it takes for electromagnetic signals to travel from the satellites to the GPS receiver. A limitation of GPS is that it cannot transmit underground or underwater and signals can be significantly degraded or unavailable in urban canyons, in road tunnels and during solar storms. This is why there is continuing interest in terrestrial based radio-positioning systems using technologies such as mobile phones, Bluetooth and Wi-Fi.
GALILEO is the first complete civil positioning system to be developed under civilian control, in contrast to the USA’s GPS and the Russian Glonass systems. GALILEO has been designed with commercial and safety-critical applications in mind, such as self-guided automated cars. The first satellite was launched on 21 October 2011 and the system is scheduled to be fully operational before 2020. When fully deployed GALILEO will consist of 30 satellites (27 operational plus 3 back-up), circling the earth at an orbit altitude of 23,222 km. GALILEO will be fully interoperable with GPS and GLONASS and is expected to achieve very high levels of service reliability and real-time positioning accuracy not previously achieved.
![Figure 3: The European Galileo satellite constellation [European Space Agency]](/sites/rno/files/public/wysiwyg/import/intelligent-transport-systems/1439558854html_html_m763d5216.jpg "Figure 3: The European Galileo satellite constellation [European Space Agency]")
Figure 3: The European Galileo satellite constellation [European Space Agency]
Digital maps are a pre-requisite for satellite navigation and many other ITS applications, such as automated driving and traveller information systems. Many technologies are currently available for creating and updating digital maps. For example, digital maps can be created by collecting raw network data, digitising paper maps, from aerial photographs and other sources. An initiative called OpenStreetMap (http://www.openstreetmap.org) intends to develop digital mapping for the whole world. The maps are developed from GPS traces collected by ordinary people and uploaded to the website. Aerial imagery and low-tech field maps are often used to verify that the resulting maps are accurate and up to date.
A navigation database is a commercially developed database used in satellite navigation systems. It is often based on a Network Gazetteer (See Infoestructura Básica) and will contain all the elements needed to construct a travel plan or a route from a specific origin to a specific destination. Additional criteria may be added such as the route passes through a specific point, that it avoids tolls, that it is the fastest or shortest available, or that it minimises fuel consumption or emissions.
A navigation database is multi-layered and requires more than the basic coordinates for the road network links and nodes, although that is an important starting point.
Additional features necessary for navigation include:
Navigation databases also contain information on points of interest and landmarks, such as public transport facilities, major office buildings by name, hotels, restaurants and tourist attractions, post offices, government buildings, military bases, hospitals, schools, petrol stations, convenience stores, shopping centres and malls, toll-booths – and in some countries, the location of speed cameras.
Crowd-sourcing and social networking has enabled the creation of navigation databases that are adapted to the needs of specific groups of road-users, such as truck drivers and cyclists. There are also important developments taking place in pedestrian navigation.
Infromation on pedestrian navigation: Financiación and http://www.navipedia.net/index.php/Pedestrian_Navigation
Location-based services are computer applications that use location data to control features or the information displayed to the user. They have several applications in health, entertainment, mobile commerce, and transport. In road transport, for instance, location-based services can be used to provide point of interest information (using data held in a navigation database – such as the closest fuel station or restaurant. Location-based services can also be used to display congestion or weather information according to the location of the user (See Servicios Basados en la Localización).
In co-operative systems, vehicles share data with each other and with the road infrastructure using vehicle to vehicle (V2V) and vehicle to infrastructure (V2I) communications. Vehicles that are connected in this way can make use of real-time information on moving objects (such as other vehicles nearby), and on stationary objects that might be transitory (traffic cones, parked vehicles and warning signs). This highly detailed, constantly changing information is held in a data store known as a Local Dynamic Map (LDM). The LDM supports various ITS applications by maintaining information on objects that influence, or are part of, the traffic. Data can be received from a range of different sources such as vehicles, infrastructure units, traffic centres and on-board sensors. The LDM offers mechanisms to grant safe and secure access to this data by means of V2V and V2I communications.
The data structure for the LDM is made of four layers:
Location referencing and object positioning for the upper layers of the LDM is complex and requires adequate location referencing methods. Since not all ITS applications need location referenced information, the use of this data is not mandatory.
These technologies allow the location of vehicles to be ascertained in real-time as they travel across the network. AVL has many useful applications for vehicle fleet management, such as improving emergency management services by helping to locate and dispatch emergency vehicles. AVL can be used for probe vehicle detection and on buses to locate vehicles in real-time and determine their expected arrival time at bus stops.
A number of technologies are available for AVL systems including dead reckoning, ground-based radio, signpost and odometer, and Global Positioning Systems. GPS is currently the most commonly used technology.
Another system for tracking and locating vehicles uses fixed point transponders which can read and communicate with other equipment – for example, toll tags on-board vehicles. These systems can determine when a vehicle passes by a certain point, and provide useful information on travel times and speeds.
A third method for locating vehicles is through mobile phone triangulation. The location of a mobile phone user is identified by measuring the distance to several cell phone towers within whose range the user is located. Using this technology, the location of the vehicle can be identified within an accuracy of about 120 meters. In rural areas, where few cell towers are located, the tower can measure the angle of transmission, which – along with the distance – can be used to locate the phone user even though the user might only be within the range of single cell phone tower. The estimated location in this case is not very accurate (within about 1.6 km).
Un prerrequisito para las Operaciones de una Red Vial es la recolección de datos precisos que definan el estado de la red vial, las condiciones del tránsito que imperan y la información acerca de las condiciones de la ruta y del medioambiente inminentes. (Ver Procedimientos de Planificación) Los datos del tránsito y de las concidiones medioambientales, incidentes y otras alertas del estado de las autopistas y rutas son usados para proveer inteligencia para las tareas de operaciones de la red, para el control del tránsito y para los sistemas de información. Este proceso de recolección de datos es llamado monitoreo de la red y puede ser emprendido usando uno de los varios medios siguientes o una combinación de ellos:
La amplitud y la confiabilidad del monitoreo afecta directamente la cantidad de información disponible para las actividades del plan de operaciones y, a su vez, al grado de gestión y control que es posible. También determina la calidad de información que es disponible para viajeros y usuarios del camino. (Ver Monitoreo de la Red)
Un número de pasos están involucrados en la organización del procesamiento de datos y la provisión de información. Ellos conforman, en conjunto, una cadena de provisión de información.
El primer paso es adquirir datos del estado de la red vial y del tránsito usándolos, así como también de otros medios de transporte que se conectan con aquéllos. Estos datos pueden provenir desde una amplia variedad de fuentes incluyendo a los vehículos sonda y los sensores viales tales como los lazos inductivos y los sensores de microondas, Circuito Cerrado de Televisión (CCTV), videocámaras web, procesamiento de imágenes de video, antenas de peaje de equipamientos de abordo vehicular. Se pueden aumentar con otra información recolectada desde las redes sociales o desde fuentes periodísticas. Las técnicas de minería de datos se aplican a datos históricos para ganar una visión adicional en las operaciones de tránsito y para proveer información predictiva de las condiciones de la red. (Ver Tránsito & Monitoreo de Estado)
Una vez que los datos son recolectados, el siguiente paso es procesarlos de manera que la información sea útil y de buen rendimiento. Ésto cubre un número de funciones básicas:
El tercer paso se relaciona con el análisis de datos. Ésto requiere una apreciación de la relevancia contextual, el procesamiento del contenido para producir información acorde a las necesidades y preferencias del usuario - incluyendo el formateo de los datos para servicio. Los datos necesitan cubrir el área geográfica de interés y ser chequeados oportunamente. Los temas claves son:
Para proveer información predictiva, se utilizan varios análisis de series temporales, minería de datos, modelización matemática y métodos de inteligencia artificial (AI) (Ver Análisis y Agrupación de Datos).
Varios métodos son utilizados para difundir los datos que han sido recolectados, procesados y analizados. Una variedad de medios de transmisión están disponibles. Por ejemplo, alertas de incidentes e información al viajero son provistas a través de muchos medios de difusión, incluyendo servicios de suscripción de datos, emisión de noticias al vaijero, radio de asesoramiento de la autopista (HAR), carteles de mensajes variables (VMS), páginas de internet y redes sociales tales como Facebook y Twitter. La protección y la integridad de la transmisión necesita ser chequeada y mantenida en todo momento. (Ver Servicios al Viajero )
La información necesita ser presentada apropiadamente en respuesta a las necesidades de los usuarios y el contexto de su uso. Un buen diseño de la interface del usuario es esencial. En centros de control de tránsito, los datos deben ser mostrados a través de imágenes captadas por videocámaras de CCTV, instaladas a lo largo del camino, sobre un video-wall o sobre pantallas de las estaciones de trabajo de los operadores. Otros grupos de interés y el público que viaja utilizará un rango de dispositivos para acceder a la información – tales como computadoras de escritorio, laptops y tablets, dispositivos móviles y teléfonos inteligentes, pantallas embarcadas en los vehículos, puntos y kioskos de información pública. (Ver Control del Tránsito)
Algunos problemas podrían surgir relacionados con la propiedad de los datos y propiedad intelectual con respecto al uso de los datos del sector público versus los datos propietarios o comerciales, marca de la información, valor de la captura, ingresos y pagos. (Ver Marco Legal y Normativo)
Un efectivo (a menudo vasto) sistema de monitoreo y supervisión del tránsito es un prerrequisito para cualquier sistema de control inteligente de tránsito para realizar un seguimiento de las condiciones imperantes a lo largo de la red. Un amplio rango de diferentes sensores se instalan dentro, sobre y/o fuera de la red para el objetivo de obtener la necesaria cobertura geográfica y de tiempos críticos. Ellos incluyen a los lazos industivos, a dispositivos no intrusivos de tránsito, a videocámaras y al procesamiento de impagenes de video. Cada tecnología tiene su propias ventajas y desventajas - de modo que la elección de un tipo de sensor de cualquier aplicación ITS application dependerá de donde funciona mejor ante las condiciones imperantes del entorno y su costo.
Los detectores de tránsito ( o los detectores de presencia vehicular) son usados en muchas aplicaciones ITS para: monitoreo de la red, control de tránsito, medición de velocidad y detección automática de incidentes. Muchos tipos diferentes de tecnologías de detección están disponibles. Las siguientes son típicas tecnologías que han sido desarrolladas para medir datos de tránsito en zonas y localizaciones específicas. (Ver Detección vehicular)
Los detectores de lazos inductivos son, actualmente, los dispositivos más ampliamente usados para detección vehicular, aunque la detección por radar de microondas es también común. Su principal uso es en intersecciones en conjunto con los sistemas avanzados de control de señales semafóricas y en autopistas para objetivos de monitoreo del tránsito y detección de incidentes. Los ILD´s toman, típicamente, la forma de una o más espiras de alambre aislado empotrados en el pavimento. El lazo o espira es conectado, a través de un cable conductor, a una unidad detectora la cual detecta los cambios en la inductancia de la espira (cambios en el campo magnético del sensor) cuando un vehículo pasa por encima de él. Los ILD´s pueden ser utilizados para detectar la presencia de un vehículo o su paso. Ellos pueden también ser usados para medir velocidad ( por medio de dos lazos separados por una corta distancia) y para clasificar tipos de vehículos. El principal problema con el uso de los ILD´s, sin embargo, es su confiabilidad. Porque los ILD´s están sujetos a las solicitaciones del tránsito, ellos tienden a fallar frecuentemente. Por otra parte, su instalación y mantenimiento requieren el cierre del carril y modificaciones en el pavimento.

Inductive Loop Detectors
Los detectores tipo Radar de Microondas son ejemplos de dispositivos de detección no intrusiva, los cuales, para su instalación y mantenimiento, NO requieren cerrar los carriles o modificar el pavimento. Contrariamente a las espiras inductivas, los dispositivos de detección no intrusiva no están empotrados en el pavimento. En lugar de ello, ellos se montan típicamente en una estructura elevada o a un lado del camino, de manera tal como se muestra el sistema de detección por radar en la fotografía siguiente. Dependiendo de tipo de onda electromagnética usada, los detectores del tipo radar de microondas pueden medir tanto la presencia como la velocidad de vehículos. Ellos también son ampliamente utilizados para detectar peatones en espera en los cruces peatonales.
Una de la mejores ventajas de los sensores de microondas es su capacidad para funcionar bajo todo tipo de condición climatológica. Las excepciones pueden ser un clima extremo tal como las tormentas de arena. Dado que estos sensores están instalados sobre la superficie del pavimento, ellos no están sujetos, usualmente, a los efectos del hielo o actividades de rotura del pavimento. La experiencia muestra que los sensores de microondas funcionan adecuadamente bajo lluvia, niebla, nieve y condiciones ventosas. Su principal problema es la oclusión provocada por vehículos altos a los vehículos adyacentes - reduciendo su precisión cuando están instalados al costado de la ruta.
")
Non-intrusive Traffic Detector (Image courtesy of the IBI Group)
Los sensores Infrarrojos (IR) son también dispositivos de detección no intrusiva. Hay dos tipos: detectores pasivos y activos.
Los detectores IR pasivos no transmiten energía - en cambio, detectan la energía que es emitida o reflejada desde los vehículos, superficies viales y otros objetos. Los detectores infrarrojos pasivos pueden medir velocidad, largo del vehículo, conteo y ocupación pero su exactitud es afectada por condiciones climatológicas adversas.
Los detectores IR activos emiten un haz de energía infrarroja el cual es reflejado desde un receptor IR. Funcionan en forma similar a los detectores tipo radar de microondas – por medio de la dirección de un haz estrecho de energía hacia una superficie vial. El haz es entonces reflejado a los sensores y los vehículos son detectados a través de cambios en el tiempo de viaje de la transmisión del haz infrarrojo. Los detectores infrarojos activos proveen la información del pasaje, velocidad, presencia y clasificación vehiculares. Trabajan bien en ambientes controlados tales como túneles – y pueden ser usados para objetivos de seguridad vial para detectar vehículos con sobrecalentamiento o fuego. Su exactitud es afectada por las condiciones climáticas tales como la niebla y las precipitaciones.
Los detectores vehiculares ultrasónicos funcionan en forma similar a los detectores de microondas por medio de la transmisión activa de ondas de presión, a frecuencias superiores al rango audible humano. Estos detectores pueden medir volumen, ocupación, velocidad, y clasificación. Los sensores ultrasónicos son sensibles a las condiciones ambientales y requieren de un alto nivel de experiencia para su mantenimiento.
El tránsito vehicular produce energía acústica o sonido audible desde una variedad de fuentes dentro del vehículo y desde la interacción entre los neumáticos vehiculares y la superficie vial. Usando un sistema de micrófonos, se diseñan detectores acústicos para captar estos sonidos desde un a´rea específica dentro de una carril de una ruta. Cuando un vehículo pasa a través de la zona de detección, un algoritmo procesador de señales detecta un incremento en la energía del sonido y se genera una señal de presencia vehicular. Cuando el vehículo abandona la zona de detección, la energía acústica disminuye por debajo del límite de detección y la señal de presencia vehicular desaparece. Los sensores acústicos pueden ser utilizados para medir velocidad, volumen, ocupación y presencia en la calzada. La ventaja de los sensores acústicos es que ellos pueden funcionar bajo cualquier condición de iluminación y durante climas adversos.
Al igual que los detectores de lazo inductivo (ILD), los magnetómetros proveen detección puntual, pero difieren de los ILD en que miden cambios en el campo magnético terrestre que resultan de la presencia vehicular. Ellos pueden proveer información del volumen del tránsito, ocupación del carril, velocidad y longitud vehicular. En general, hay dos tipos de magnetómetros:
Las microespiras, (como las espiras inductivas), requieren el cierre del carril y la modificación del pavimento con las consiguientes demoras al tránsito. En los años recientes, el uso de magnetómetros inalámbricos ha recibido un interés creciente debido a los avances en la tecnología de las baterías, la cual le permite a una unidad operar inalámbricamente durante un período de 10 años antes de necesitar ser reemplazada.
Traffic Detector Video Training Course - Part 1 - Detector Theory
Traffic Detector Video Training Course - Part 2 - Detector Design
Traffic Detector Video Training Course - Part 3 - Detector Installation
Traffic Detector Video Training Course - Part 4 - Detector Maintenance
La identificación automática vehicular (AVI) puede ser usada para identificar vehículos que circulan a través de una zona de detección. Típicamente, un transponder (o tag) montado dentro de un vehículo puede ser leído por un lector cuando el vehículo pasa. Esta información pueden entonces ser transmitida a una computadora central. Actualmente, la aplicación más común en el transporte terrestre de tecnologías AVI está en combinación con los sistemas automáticos de pago de peaje (Automatic Toll Collection systems), (tales como el EZPass). Con estos sistemas, el valor del peaje es deducido automáticamente de la cuenta del conductor cada vez que él pasa por una estación de peaje.
Un importante método de AVI, con un uso combinado, es el sistema llamado ANPR (también conocido como Reconocimiento automático de la placa de licencia Automotor - ALPR), el cual usa tecnologías de reconocimiento óptico de los caracteres para identificar y reconocer las placas registradas de los vehículos. El sistema típicamente consiste en una videocámara, especialmente adaptada, enlazada a un software de reconocimiento de caracteres. Cuando un vehículo pasa por una videocámara ANPR/ALPR, su número de registro es leído y puede ser chequeado contra una base de datos de los registros de los vehículos. En general, hay dos tipos de sistemas ANPR/ALPR:
Con los avances recientes en hardware y software informático, el procesamiento en el campo en tiempo real se va vuelto más factible ( usualmente toma menos de 250 milisegundos). Ésto evita el costo asociado con la necesidad de un gran ancho de banda para transferir imágenes un servidor remoto.
Los sensores de pesaje en movimiento están diseñados para medir y registrar los pesos por eje y pesos totales de los camiones mientras los vehículos están en movimiento (circulando – no detenidos). Los sistemas WIM son atractivos porque evitan la necesidad de detener y pesar cada vehículo. Ellos no eliminan la necesidad de tener estaciones de pesaje (con puente basculante) para la medición exacta del peso de los camiones, pero el WIM actúa como un filtro (una preselección) y sólo los vehículos que registran un exceso en la carga axial necesitan ser detenidos y revisados. El componente clave de cualquier sistema WIM es el sensor de fuerzas – por ejemplo, los cristales de cuarzo producen cargas eléctricas cuando una fuerza es aplicada a lo largo del eje vertical (el peso del vehículo). Los sistemas WIM tienen varias aplicaciones en ITS, especialmente tanto como siendo una parte de un sistema electrónico de preselección para vehículos comerciales como para aplicaciones de fiscalización. (Ver Aplicación de la Ley y Ver Video)
La detección de velocidad es una parte integral de los sistemas de fiscalización de velocidad mediante videocámaras, utilizados para detectar infracciones a la velocidad admisible fijadas por las reglas de tránsito, especialmente en puntos con alta probabilidad de accidentes. (Ver Gestión de la Velocidad) La reglamentación de la velocidad es importante en zonas con personal trabajando que tienen un riesgo elevado de accidentes. Es también una característica de los esquemas de gestión activa del tránsito en autopistas. Algunos sistemas de fiscalización de la velocidad enlazan automáticamente las videocámaras de velocidad al reconocimiento del número de placa patente automotor para emitir avisos de infracciones. (Ver Gestión del Tránsito y Estrategias de Gestión del Tránsito) La detección de velocidad puede ser también usada como una medidad de seguridad vial en intersecciones señalizadas de arterias viales rápidas, usando microprocesadores para extender el tiempo de verde de las señales de tránsito cuando un vehículo se aproxima a velocidad.
Para medir velocidades, el dispositivo más común es un sensor o radar el cual usa el principio del efecto Doppler. Específicamente, el dispositivo mide la diferencia en las frecuencias emitida y reflejada de la ona del radar, la cual es proporcional a la velocidad del objeto en movimiento. Otros tipos de sensores vehiculares pueden ser adaptados por pares para medir velocidades, tales como los sensores ultrasónicos y los magnetómetros.
El monitoreo del tiempo de viaje está relacionado con el monitoreo de la velocidad. Los tiempos de viaje vehiculares son una fuente significativa de información para el monitoreo de la performance de la red vial y para el aviso a los usuarios del camino acerca de las demoras en los tiempos de viaje en tiempo real. Ellos representan una medida del nivel de servicio ofrecido. Algunas autoridades viales muestran los tiempos de viaje punto a punto sn carteles de mensajes variables VMS sobre la ruta como una forma de información en tiempo real. Los datos de tiempos de viaje (históricos y en tiempo real) representan también un recurso útil que ayuda a la planificación y logística del viaje. (Ver Monitoreo de Tiempos de Viaje)
Varios métodos están disponibles para seguir vehículos en forma anónima sobre la red vial para permitir a los operadores de la red dterminar los tiempos promedio de viaje, la demana punto a puento y las condiciones del flujo vehicular. Por ejemplo, los sistemas de Recolección Automátoca de Pago de Peaje (ATC) pueden ser utilizados para determinar el tiempo promedio de viaje en una autopista entre las estaciones de peaje o con lectores especialmente instalados en la ruta. Los vehículos equipados con tag infrarrojos son usados como sondas para monitorear las condiciones del flujo vehicular, las cuales son detectadas mediante los lectores tipo transponders, instalados a lo largo de las rutas. El agregado de datos de las velocidades y de los tiempos de viaje promedio puede ser compilado y, de esta manera, ayudar a la gestión del tránsito y sus incidentes. Para proteger la privacidad de los viajeros, estos sistemas no toman los datos de los identificadores tipo tag para peajes y solamente mantienen registros de los viajes hechos por vehículos anónimos.
Un número de otras técnicas son usadas para proveer un continuo, no invasivo, seguimiento punto a punto de vehículos individuales para determinar tiempos de vaije y calcular velocidades promedio. Se incluyen las videocámaras de reconocimiento automático del número de placa patente automotor (videcámaras ANPR) para identificar las plcas de licencia vehiculares. Un nuevo desarrollo es el monitoreo punto a punto de las firmas Bluetooth emitidas por el equipamiento presente en el vehículo. Los sensores Bluetooth han sido utilizados exitosamente para el monitoreo de la velocidad promedio como una alternativa económica al sistema ANPR. Algunas autoridades viales usan los datos agregados (en forma anónima) para mostrar en un VMS y proveer a los conductores los tiempos de viaje esperados entre puntos claves del la red vial.
Los sensores medioambientales son usados en el monitoreo de la red vial para detectar condiciones climatológicas adversas tales como hielo o conidiciones de resbaladizas, fuertes vientos o precipitaciones (nieve o lluvia) o la presencia de niebla / bruma. Esta información puede entonces ser usada por los operadores para alertar a los conductores a través de carteles de mensajes variables (VMS). Pueden ser usados también por el personal de mantenimiento para optimizar las operaciones de mantenimiento invernal. (Ver Monitoreo del Clima)
Los sensores medioambientales pueden ser divididos en séis tipos:
Muchos fabricantes proveen sistemas de estaciones meteorológicas completos que son capaces de monitorear una amplio rango de condiciones de superficie y medioambiente. La figura siguiente muestra un ejemplo de estas estaciones meteorológicas.
(Figura 4.7 debe ser insertada aquí – debe ser provista por el autor)
Las estaciones meteorológicas típicamente incluyen los siguientes tipos de sensores y capacidades:
Sensores de condición del camino: Un componente crítico de cualquier sistema de información meteorológica en la red vial (o RWIS) es un conjunto de sensores de condición del camino que midan la temperatura y la humedad de la superficie y detectar la presencia de espesores de hielo y nieve. Los sensores de condición del camino pueden ser empotrados en el pavimento. Pueden ser también no intrusivos, montados al lado o sobre la superficie vial. Los sensores no intrusivos de condición del camino típicamente miden la radiación infrarroja emitida desde la superficie del camino.
Sensores de Visibilidad: Estos sensores están diseñados para medir la visibilidad a lo largo de una sección del camino. Típicamente usan el principio de “dispersión hacia adelante” o difracción de la luz para detectar los cambios en la visibilidad resultante por las condiciones del clima imperante, tales como niebla, humo o neblina. Los sensores necesitan ser cuidadosamente ubicados porque ellos sólopueden proveer medidas puntuales en una localización específica. Por ejemplo, los detectores de niebla necesitan ser situados tan cerca como sea posible de la fuente donde la niebla o bruma se formada en primera instancia.
Mapeo térmico: Dado que las temperaturas pueden variar significativamente a lo largo de un segmento vial, los sensores de mapeo térmico (temperatura) son típicamente un componente crítico de un sistema eficaz de detección de hielo. El mapeo térmico provee a los operadores de información sobre las temperaturas de la superficie vial para informar la toma de decisiones sobre la necesidad de establecer mensajes de alerta en los VMS o desplegar el despeje de nieve, el salado de la ruta o los servicios de enarenado. Ejemplos de sensores de imágenes térmicas incluyen videocámaras de imágenes térmicas y termografía infrarroja.
Sensores de velocidad del viento: éstos representan un componente esencial de una estación de sensado experimental y son instalados y expuestos en lo alto de los puentes y en lugares ventosos de la red vial. Típcamente miden la velocidad y dirección del viento en la superficie y pueden ser usados para proveer alertas a vehículos de los servicios de grúa y vehículos de gran porte. Por razones de seguridad, a veces, es necesario cerrar el camino debido a fuertes vientos.
Los informes móviles pueden ser dividos en dos categorías:
En muchos casos, los informes de incidentes son hechos por ciudadanos y la policía puede proveer una información significativa para el monitoreo de la red vial – y a muy bajo costo comparado con otras tecnologías de supervisión. Los informes móviles no proveen una continua corriente de los datos de condición provista por tras tecnologías de supervisión, pero proveen información eventual a intervalos impredecibles que son muy útiles para los objetivos de la gestión del tránsito. En particular, los informes móviles son muy efectivos para la detección de incidentes.
Un número importante de diferentes métodos de información móvil es usado en las operaciones de la red vial.
Los teléfonos celulares representan una muy efeciza herramienta para la detección de incidentes. Muchas regiones han establecido una línea telefónica directa (hotline) para informar sobre incidentes para alentar a los ciudadanos a que informen los incidentes de tránsito. Ésto tiene una ventaja de bajos costos al inicio.
El uso extendido de los teléfonos celulares puede proveer una útil información del tránsito. Las técnicas de triangulación pueden determinar la posición de un vehículo por medio de señales de medición desde un teléfono celular a bordo del vehículo. Para permitir ésto, el teléfono celular necesita estar comunicado con más de un teléfono celular – preferiblemente tres o más para la exactitud – de modo que la triangulación pueda tomar lugar. Cada teléfono está típicamente identificado por su número de serie electrónico. Este concepto fue primero probado en el área de Washington D.C. a mediados de 1990. Este concepto es diferente que los sistemas AVI basados en GPS, en los cuales la unidad GPS del teléfono determina la localización, la cual es luego comunicada desde el teléfono al sistema central de procesamiento.
Los Teléfonos de Emergencia al costado del Camino (Emergency Roadside Telephones - ERT) o Postes S.O.S. fueron, normalmente, provistos antes que los teléfonos celulares se vuelvan ampliamente disponibles. Los ERTs aún proveen un servicio valioso donde hay un bajo uso de teléfonos celulares particulares o en puntos negros para el uso de los teléfonos celulares (sin señal). Ellos proveen una localización precisa al operador de dónde una persona que llama está ubicada y permite a los automovilistas varados solicitar ayuda. En general, permiten a los viajeros informar sobre incidentes tales como siniestros o animales extraviados en la ruta.
Para usar un Poste de Emergencia, el automovilista sólo necesita levantar el receptor o presionar una llave para requerir los servicios de la policía o de los servicios de emergencia. El que llama es automáticamente conectado con el operador del centro de control.
Los tipos avanzados de ERTs proveen la cancelación del ruido de fondo contra el ruido del tránsito, y una simple pregunta de fácil respuesta basada alrededor de las palabras claves «si» y «no» en caso de sordera profunda o de viajeros extranjeors. El operador tiene una lista formal de preguntas que puede realizar con una secuencia escribiendo las preguntas. Las preguntas aparecen en una pequeña pantalla en el ERT y el usuario responde usando las palabras clave si y no. La opción para elegir diferentes idiomas es una gran ventaja cerca de puertos o cruces fronterizos donde existe una alto porcentaje de visistantes extranjeros. También tienen una función de devolución del llamado que habilita al operador a llamra al automovilista varado, con una baliza y un tono de llamado para atraer su atención.
Típcamente, los teléfonos están ubicados al lado de la autopista y están espaciados a distancias que van desde las 0.25 millas a las 0.50 millas. En carreteras de doble calzada, autopistas y autovías los postes necesitan ser ubicados de a pares a cada lado del camino para evitar que los usuarios sean tentados a cruzar el camino para utilizarlos.
(Figura 4.5 Call Box – Imagen a ser provista por Barry Moore)
Éstos son equipos de oficiales entrenados quienes son responsables de cubrir a segmento dado de la autopista. Las patrullas móviles tienen una parte central que jugar en las operaciones de la red vial, puntenado escombros sobre la carretera, relacionándose con los incidentes y el público en general. Un vehículo del servicio de patrulla de la autopista [Figura 4.6] está típicamente equipado para ser capaz de ayudar a los motoristas varados y, donde sea posible, despejar el sitio del incidente. Las patrullas móviles son capaces no solamente de responder ante incidentes sino en algunos casos para manejar el poceso completo de la gestión del incidente (detección hasta el despeje).
La tecnología, en la forma de comunicaciones móviles seguras y tablets portátiles provee gran ayuda. Las radiocomunicaciones móviles TETRA ofrecen la capacidad de transmisión digital mientras mantienen las ventajas de un sistema privado de radio´comunicación (PMR). En las futuras patrullas de servicio deben existir capacidades de comandos y control para dirigir y gestionar la implementación de recursos viales – y el potencial para establecer VMS y señales sobre la localización, remotamente desde el costado de la carretera.
Figura 4.6 Un Vehiculo Patrulla de Servicio de la Autopista
Una técnica relativamente nueva para recolectar información relacionada con el tránsito basada en informes móviles es el llamado "crowdsourcing" que se podría traducir como "múltiples fuentes de información" – usando las redes sociales tales como Facebook y Twitter. El Crowdsourcing es el proceso de obtener información en la red provista por una multitud de gente. Este método se va vuelto factible en los años recientes debido al significativo desarrollo de las tecnologías de localización y de comunicaciones, que están enlazadas a los teléfonos móviles, los cuales tienen conectividad a Internet. En el transporte terrestre, el concepto crowdsourcing puede ser usado para recolectar información vital relacionada con el viaje en colaboración con los miembros de la comunidad. Uno de los más famosas y exitosas aplicaciones crowd-sourcing es WAZE (https://www.waze.com/) – una de las aplicaciones de navegación y tránsito más grandes en el mundo basada en la comunidad mundial. Los usuarios de WAZE compraten información del tránsito en tiempo real, permitiendo a sus miembros de la comunidad en red ahorrar tiempo y combustible mientras viajan.
Estos vehículos son utilizados para informar sobre los tiempos de viaje y para detectar incidentes de tránsito – monitoreando su progreso en tiempo y espacio. Ésto puede ser realizado o bien usando sistemas automáticos de localización vehicular o por medio del seguimiento del progreso de vehículos identificados entre puntos fijos conocidos de la red vial. La localización del vehículo en tiempo y lugar es comunicada a una computadora central donde los datos de diferentes fuentes son procesados para determinar el estado del flujo vehicular en el sistema de transporte.
Los vehículos sonda pueden proveer mucha información útil que otras técnicas de detección no pueden – incluyendo información en enlaces sobre tiempos de viaje, velocidades promedio e información de la matriz origen - destino.
Diferentes tecnologías están disponibles. Éstas incluyen:
Los métodos de vehículos sonda otorgan mayor confiabilidad pero menor cantidad de datos que el proceso crowd-sourcing, el cual puede proveer una mejor cobertura geográfica. Los vehículos sonda son, a menudo, implementados por operadores viales en colaboración con los propietarios de fltas de vehículos que regularmente circulan por la red vial.
Las videocámaras CCTV juegan un importante papel en la gestión de la red vial. Ellas son instaladas en lugares sensibles de la red vial para ayudar a la gestión del tránsito, donde la congestión y las colas de tránsito sean frecuentes y en otros sitios donde exista un riesgo elevado de accidentes e incidentes de tránsito. Cuando se usan para supervisión del tránsito, o bien pueden tener un campo de visión fijo o bien - por ejemplo, cuando son usadas para monitorear el tránsito y proveer alertas – o bien ser equipadas con una función pan, tilt y zoom (PTZ) para permitir a los operadores tener un amplio campo de visión.
Las videcámaras con un campo de visión fijo son generalmente usadas para monitorear secciones viales donde la circulación por las banquinas es permitida.
Las videocámaras con Pan, Tilt Zoom (PTZ) son comúnmente usadas para:
Las videocámaras fijas o PTZ pueden ser usadas:
Los operadores de la sala de control dependen de las imágenes de la videocámara CCTV – mostrándolas o bien, en sus estaciones de trabajo o a gran escala en un “video wall”. Las imágenes de las videocámaras CCTV son un importante medio de supervisión del tránsito que se complementa con las otras medidas del control de tránsito. Los operadores relacionan las imágenes desde la videocámaras CCTV para detectar y monitorear los incidentes de tránsito y evaluar el número de carriles afectados. Por ello es posible, estimar el tiempo estimado de duración del incidente de tránsito basado en la previa experiencia y en las técnicas de simulación del tránsito. El procesamiento de la imágenes de video es usado para alertar a los operadores de la sala de control de vehículos detenidos y otros eventos inusuales. Los operadores a menudo desean ver un secuencia de imágenes de sucesivas videocámaras, de forma tal de realizar un “video tour” (Ver Medidas de Control del Tránsito).
 Closed Circuit TV Camera (Image courtesy of the IBI Group)")
Pan, Tilt and Zoom (PTZ) Closed Circuit TV Camera (Image courtesy of the IBI Group)
El procesamiento de imágenes de video (VIP) identifica a vehículos y a los parámetros de flujo de tránsito asociados por medio del análisis de las imágenes provistas por las videocámarras CCTV, las cuales, normalmente, tienen un campo de visión fija. El agregado de VIP mejora significativamente la utilidad del CCTV, particularmente donde existe un gran número de videocámaras instaladas, por lo que el operador no puede ver todas al mismo tiempo. El VIP también provee los medios para alertar a los operadores sobre los incidentes de tránsito.
Las imágenes analógicas de CCTV son digitalizadas y luego pasadas a través de una serie de algoritmos que identifican los cambios en el fondo de la imágen. En las modernas videocámaras la imagen de vídeo está también en un formato digital – lista para su procesamiento, El sistema VIP consiste de una videocámara (un digitalizador en el caso de videocámaras analógicas) y un microprocesador para el procesamiento de las imágenes digitales - y el software para interpretar el contenido de la imagen y para extraer la información de detección de aquélla.
Con el procesamiento digital, CCTV provee una alternativa, fuera del pavimento, a los lazos inductivos u otros medios de detección vehicular. UNa gran ventaja de los sistemas VIP es su capacidad de proveer detección sobre un gran número de carriles y en múltiples zonas dentro de un carril – proveyendo una amplia área de detección. El usuario puede fácilmente modificar las zonas de detección, en cuestión de segundos, a través de una interface gráfica – sin la necesidad de cerrar carriles ni trabajar sobre el pavimento. Una pobre iluminación, sombras y un mal clima pueden afectar negativamente el rendimiento de los sistemas VIP. Estudios de evaluación en el condado de Oakland, Michigan indican que los sistemas modernos VIP poseen una excelente performance con un exactitud de detección de más del 96% bajo cualquier condición climática.
Los sistemas VIP pueden ser combinados con sistemas de CCTV para proveer una excelente herramienta de detección, particularmente para detección de incidentes y objetivos de verificación. Cuando ocurre un incidente, el usuario puede mutar desde el modo VIP al modo estándar CCTV y, entonces, verificar la ocurrencia del incidente a través de los controles pan/tilt/zoom.
Una interface eficaz con los usuarios es una parte esencial de muchas aplicaciones ITS. Los usuarios incluyen a los operadores del centro de control, a los servicios de la policía y los de emergencia, a los usuarios viales y a los viajeros. Muchas tecnologías soportan a la difusión de la información del estado del camino, en forma previa y durante el viaje. Para que la información al viajero esté disponible, los datos actuales e históricos de tránsito y el estado de situación de la red vial necesitan ser monitoreados y procesados estableciendo un formato que permita que los viajeros puedan acceder fácilmente (Ver Sistemas de Información al Viajero).
La información del tránsito previa a un viaje provee a los viajeros de información antes de que ellos comiencen su jornada. Los ejemplos de información al viajero previa al viaje incluyen la información sobre las actuales y estimadas condiciones del tránsito, las actuales y esperadas condiciones del clima y la información sobre los cronogramas y tarifas del transporte público. Ésto intenta ayudar a los viajeros para que tomen decisiones de partida basadas en la información de rutas/modos/tiempos (Ver Información Previa al Viaje).
La información del tránsito durante el viaje en ruta provee a los viajeros de información mientras ellos están viajando. La información durante el viaje en ruta incluye muchos de los mismos elementos provistos para la planificación previa al viaje – pero actualizada en tiempo real – tal como la información sobre las actuales y estimadas condiciones del tránsito y del clima, la información sobre incidentes y la sugerencia de desvío de la ruta elegica.
ITS usa muchas plataformas de difusión de la información del tránsito para mantener a la gente informada acerca de las actuales y de las estimadas condiciones del viaje. Éstas incluyen a los Carteles de Mensajes Dinámicos (DMS o VMS), las Advertencias vía Radio de la Autopista (HAR), cable TV, sitios de internet de información al viajero, sistemas telefónicos dedicados, aplicaciones de telefonía celular – y pantallas embarcadas en los vehículos. Los dispositivos de difusión de la información pueden ser clasificados en:
Con la proliferación de los dispositivos informáticos portátiles – tales como los teléfonos inteligentes y las tablets – estas tres formas de distinción es menos clara actualmente que lo que solía ser. Éstos son capaces de acceder a Internet mientras el viajero está viajando en la ruta y pueden ser considerados como una distracción al conductor y existir las regulaciones contra su uso en ciertas circunstancias (Ver Factores Humanos ).
Los Carteles de Mensajes Dinámicos son también conocidos como Carteles de Mensajes Variables o Carteles de Mensajes Cambiables. Es este portal se usa la siguiente terminología:
Un DMS puede ser o bien un Cartel de Mensajes Variables (VMS) o bien un Cartel de Mensajes Cambiables (CMS) donde:
Los DMS son casi los más comunes tipos de dispositivos de provisión de información. Ellos pueden ser fijos o portátiles com se muestra en la figura siguiente. Ellos pueden estar basados en textos, en gráficos o en una combinación de ambos dos. (Ver Gestión del Tránsito)

Figure 4.12 Fixed Dynamic Message Signs

Figure 4.13 Portable Dynamic Message Signs
Los DMS pueden ser usados para proveer a los viajeros de información sobre cierre de carriles, velocidades recomendadas, condiciones del tránsito y del clima, localización de incidentes, demoras estimadas, obras de construcción, rutas alternativas y aviso de velocidad. Hay diferentes tipo de DMS: pueden ser retroiluminados, emisores de luz e híbridos de acuerdo a la tecnologia usada. Los diodos emisores de luz (LEDs), generalmente, constituyen la opción preferida donde existe alimentación eléctrica (incluyendo las opciones de energía solar).
Como su nombre lo indica, éstos dependen de un fuente externa de luz, tales como el sol, o iluminación superior para hacerlos visibles – por medio de la reflexión de la fuente de luz. Los diferentes tipos de carteles de este tipo incluyen un tambor rotativo y carteles de matriz de disco reflectiva. Los carteles de tambor / tablas rotativas están hechos de uno a cuatro tambores de múltiples caras, cada una conteniendo de dos a séis mensajes de textos o gráficos. La principal aplicación de esta tecnología de tambor/placa rotativa es cuando se incorpora en un cartel de dirección fija – es para proveer instrucciones variables, que son idénticas en apariencia en una cara fija del cartel para mostrar una dirección alternativa hacia un destino.
Los carteles de matriz de disco reflectiva comprenden una formación de indicadores pivotes, permanentemente magnetizados, que son negros de un lado y blanco o amarillo reflectivo por el otro lado. Cuando un pixel específico es activado, una corriente eléctrica voltea al indicador desde el acabado negro al acabado amarillo reflectivo.
Los carteles de matriz de disco reflectivo fueron populares en los años 1970 para los sistemas de gestión de las autopistas debido a que eran más económicos que los carteles emisores de luz. La falla mecánica de todo o parte del mensaje es común (falla del disco). Como los carteles LED se convirtieron en menos costosos esta antigua tecnología está cayendo fuera de uso. Reflective disk matrix signs were popular in 1970s for freeway management systems because they were less costly than light-emitting signs.
Éstos generan su propia luz sobre o detrás de la superficie de observación – pueden ser monocromáticos o de color total. Los cartles DMS de diodos emisores de luz (LED) y de fibra óptica, son dos ejemplos:
El LED se ha convertido en la tecnología preferida. Versiones nuevas de carteles DMS LED proveen una pantalla conocida como full matriz que puede mostrar gráficos e imágenes.
Los DMS híbridos combinan las características de ambos cartles mencionados, los de reflexión y los de emición de luz. Uno de los mejores ejemplos de cartles DMS híbridos es el DMS de discos reflectivos / fibra óptica o LED. Durante condiciones de clima donde el DMS reflectivo no es claramente visible, estos sistemass híbridos pueden usar las tecnologías de emisión de luz, tales como las fibras ópticas o los LEDs. Cuando el sol está brillando, las fuentes de luz se apagan. Los LEDs de estado sólido son más confiables que los discos reflectivos dado que no existe el riesgo de fallas mecánicas.
La marcación vial o las balizas de los carriles (también conocidas como tachas viales inteligentes) pueden ser usadas para transmitir importantes mensajes a los conductores, además de su principal función de iluminar el camino por la noche. Por ejemplo, los marcadores viales pueden ser usados para comunicacr el correcto uso del carril. Las tachas viales inteligentes han sido usadas para señalizar el uso de la banquina durante períodos de alta congestión, alarmas de peligro y en operaciones de uso parcial de carriles para los autobuses.
Estos dispositivos son generalmente ubicados dentro del vehículo y, al iguala que los DMS, están diseñados para proveer información a los conductores mientras enstán en ruta. Los dispositivos embarcados de información pueden proveer información por medios auditivos o visuales. Ejemplos de dispositivos embarcados de información acústica incluyen a la radio de advertencia de la autopista (HAR), las líneas dedicadas de telefonía celular y las radios comerciales. Ejemplos de dispositivos embarcados de información visual incluyen a las pantallas de video y las pantallas head-up (en las cuales los conductores pueden leer sin alterar su normal posición visual.
La Radio de Advertencia de la Autopista (HAR) provee otros medios de difusión de la información a los conductores mientras viajan por la ruta. Típicamente, la información es provista a través de un receptor de radio AM. Los conductores son informados acerca de la existencia de una señal por medio de carteles, los cuales generalmente están instalados aguas arriba de la señal, avisando a los conductores para que sintonicen la radio en una frecuencia específica (generalmente de 530 kHz o 1610 kHz) (Ver Radio).
La HAR puede ser usada para proveer a los viajeros información similar a la provista por un VMS. Una ventaja de la HAR comparada con el VMS es que distrar menos – dado que la información es provista a través de un canal sensorial (audio) que reduce la sobrecarga de información visual. Mensajes más complejos son también posibles con la HAR comparado con un DMS. La desventaja es que son los usuarios mismos los tienen que sintonizar la frecuencia.
Otra forma de proveer información a los conductores en ruta – la cual se ha incrementado en popularidad con el amplio uso de los teléfonos celulares – involucra al sistema telefónico de líneas dedicadas “hotline” para información del tránsito, a la cual los conductores pueden llamar desde su teléfono celular mientras están en ruta( tal como el sistema 511 en USA). Los sistemas telefónicos, generalmente, incluyen un menú por tonos y touch screen que permite a los que llaman recibir información del tránsito en una ruta específica – ésto le otorga al conductor el control sobre el tipo de información recibida.
La radio comercial es otro medio de proveer información al viajero en la ruta. La principal desventaja de la radio comercial es la exactitud y la oportunidad de la información. Típicamente, la información es difundida solamente cuando la normal programación lo permite - y, en muchos casos, ésto puede ser inapropiado dado que un incidente ya pudo haber sido solucionado en el momento en que la la normal programación permite su difusión.
Un reciente enfoque para difundir información del tránsito en ruta involucra al uso de terminales de video en pantallas en el tablero de comando y en los cabezales del automóvil. Es necesario minimizar la distracción del conductor por lo que hay que prestar mucha atención en el diseño de estas interfaces Humano-Máquina. (Ver Factores Humanos ).
Estas tecnologías son ampliamente utilizadas para la difusión previa al viaje y fuera de la ruta. Están incluidos: TV por cable, internet, pagers, teléfonos inteligentes y computadoras tipo tablet. Muchas áreas metropolitanas alrededor del mundo tienen portales de internet y aplicaciones telefónicas dedicados a la información al viajero. Estos sistemas proveen a los viajeros una rica información relacionada con los viajes, incluyendo condiciones actuales de viaje, alertas y otra información oportuna. Un mapa del tránsito, mostrando las velocidades actuales, localizaciones de cualquier incidente o zaona de construcción, típicamente forma parte central de estos portales. Entre las tecnologías utilizadas para la difusión de la información fuera de la carretera están las pantallas y kioscos públicos de información en forma dinámica – y los dispositivos móviles.
Grandes centros comerciales de compras y autopistas, frecuentemente, tienen pantallas y kisocos de información dinámica donde pueden proveer información en tiempo real. Ésto es también posible en las áreas de descanso de las autopistas. Estas pantallas y kisocos fueron muy útiles antes del amplio uso público de las computadoras portátiles y los teléfonos inteligentes. Con el advenimiento de estas tecnologías, las pantallas y kioscos de información pública han jugado un papel secundario esn la difusión de la información. Todavía, están disponibles en muchos sitios y son útiles para aquellos sectores de la población que no tienen acceso a la computación portátil y a los teléfonos inteligentes.
La alta penetración en el mercado de los teléfonos inteligentes, computadoras portátiles y dispositivos de navegación personal ha provisto a la industria del transporte de una invaluable herramienta para la difusión de la información de viaje. La única ventaja de estos dispositivos nómades y móviles es que se tiene la información disponible para los viajeros en forma continua e inenterrumpida.
Muchos dispositivos y servicios de navegación incluyen información en tiempo real acerca de las conidiones de la red de transporte. Ésto lo demuestran los servicios tales como los mapas y navegación de Google – así como también los dispositivos de navegación GPS que pueden recibir información de las condiciones del tránsito en tiempo real. Las redes sociales, como fuentes múltiples de información recibida desde la gente (Crowd-sourcing), son también usadas para recolectar y difundir información de viaje.
Las telecomunicaciones representan una parte esencial de los Sistemas Inteligentes de Transporte y de las Operaciones de las Redes Viales. En los últimos 40 años, se han desarrollado, poco a poco, para ayudar a las operaciones de la red – por ejemplo, enlazando centros de control con los dispositivos de la carretera tales como teléfonos, videcámaras CCTV, carteles de mensajes variables (VMS) y señales de tránsito. Actualmente, las comunicaciones digitales dominan la transmisión de señales de voz, video y datos. La tecnología digital es inherentemente más confiable, flexible y manejable comparada con las previas generaciones de la tecnología de la comunicación. Las comunicaciones digitales permiten el desarrollo y la operación de la moderna tecnología de gestión del tránsito y de las últimas aplicaciones ITS – incluyendo a los vehículos conectados a la Gestión Activa del Tránsito. Está creciendo el uso de CCTV y la transmisión digital de las imágenes de video a distancia es posible sin que la imagen se degrade.
Las redes de telecomunicaciones se parecen al sistema nervioso del ser humano. Específicamente, las redes de comunicaciones enlazan a los diferentes componentes de los ITS en forma conjunta, permitiendo obtener un verdadero sistema integrado. Por ejemplo, ellas proveen un enlace de datos desde los dispositivos de campo (tecnologías de detección, carteles de mensajes dinámicos, controladores de señales) a los centros de operaciones del tránsito – donde los datos recolectados son fusionados, analizados para actuar en consecuencia. Ésto se ilustra en el siguiente diagrama. Las telecomunicaciones son también necesarias para enviar instrucciones y comandos desde los centros de control hacia los dispositivos de campo con propósitos de control del tránsito. También, son los medios para retransmitir información desde los operadores de infraestructura (controladores) hacia los viajeros y grupos de interés.
")
National Roads Transmission Network for England (Courtesy of Highways England. In this diagram MIDAS means Motorway Incident Detection Alert System.)
Un sistema ITS no funcionará sin una red de comunicaciones diseñada apropiadamente que tenga el ancho de banda adecuado y que sea capaz de entregar un adecuado nivel de servicio (en términos de entrega de mensajes, latencia y tasas de caída). Las decisiones sobre una adecuada tecnología de comunicación, una apropiada topología de red y otros temas de diseño de las comunicaciones deben ser hechas cuidadosamente. Ésto es debido a que el costo de la red de comunicaciones usualmente constituye el principal del costo de un específico sistema ITS. En algunos casos, donde se necesitan instalar cables e infraestructura para el equipamiento de transmisión, puede alcanzar más del 50%.
Existe un número de opciones para los profesionales de ITS. Los operadores de tránsito necesitan decidir cuál es la mejor manera de considerar las necesidades de comunicaciones y si ellos son capaces de hacerlo. Hablando en general, las tecnologías pueden ser divididas en comunicaciones por cable o inalámbricas. La elección para las instalaciones de campo es frecuentemente una solución equilibrada entre los costos y las capacidades funcionales.
La red de telecomunicaciones para soportar a los ITS necesita ser cuidadosamente diseñada. Una arquitectura común para tal red es conocida como una arquitectura jerárquica o por niveles / capas, los cuales exhiben muchas similitudes al sistema jerárquico de las redes viales. Específicamente, las redes de telecomunicaciones pueden ser consideradas como consistentes en cuatro niveles:
Usando a las autopistas como una analogía a las telecomunicaciones, el nivel backbone es similar a las carreteras estratégicas interurbanas / interestatales. Permite transportar (hauling) grandes cantidades de datos entre un número limitado de puntos fijos de distribución. Como en las redes viales, las diferentes capas de la red de comunicación están interconectadas. Los cables de fibra óptica son los comúnmente usados para este nivel.
La función de la capa de transporte es mover (haul) grandes cantidades de datos ( los cuales aún requieren una gran ancho de banda) desde la red principal (backbone) al Centro de Control de Tránsito. A menudo, está fuera de la red de la carretera / autopista – y puede ser provista por un proveedor de servicios tal como una compañía de telecomunicaciones (TelCo).
La capa de distribución se parece al sistema de carreteras arteriales en una red vial. Esta capa, típicamente, no maneja grandes volúmenes de datos. Su principal propósito es proveer múltiples puntos de presencia para mejorar la accesibilidad.
Finalmente, la capa de acceso se parece a una red vial urbana o residencial o el cable que conecta la TV con la toma de antena - que provee yn cableado local para acceder a los diferentes dispositivos de la red.
Otra opción para las agencias de transporte es arrendar los servicios cableados de comunicaciones a una compañía de telecomunicaiones. En los primeros años de ITS, algunas aplicaciones ITS (sistemas urbanos de control) usaron líneas telefónicas arrendadas – su limitación es el bajo ancho de banda provista por las líneas telefónicas. Actualmente, está siendo más económico usar WiFi para reemplazar los circuitos telefónicos arrendados, particularmente en áreas urbanas – como una alternativa a las costosas nuevas redes de cables para carreteras interurbanas cuando los requerimientos de ancho de banda son modestos.
Recientemente, nuevas tecnologías se han desarrollado para ayudar a mejrar la velocidad de comunicación en las redes telefónicas locales. En particular, las líneas abonadas digitales (DSL) – las cuales usan bandas de muy alta frecuencia para datos – pueden ofrecer velocidades de hasta 40 Mbits/seg. La línea abonada digital asimétrica (ADSL) es un tipo de tecnología de línea abonada digital (DSL) que permite una más rápida transmisión de datos sobre líneas telefónicas de cobre. Otra tecnología es la de internet vía cable la cual usa las redes de televisión por cable casi en la misma forma que la DSL usa las líneas telefónicas. El cable de Internet podría tener velocidades de hasta 400 Mbits/segundo – y también puede soportar la mayoría de las aplicaciones ITS que tienen requisitos de ancho de banda exigentes.
Frecuentemente, es más económico arrendar fibras libres a un operador de telecomunicaciones o comprar la prestación de su servicio más que instalar un sistema dedicado. Los Sistemas Arrendados de Comunicaciones en ITS son ampiamente utilizados para los sistemas urbanos de control y para proveer el transporte para la conexión entre los centros de gerenciamiento del tránsito (TMCs) y los dispositivos de comunicaciones de campo en una carretera. Existen dos razones para ésto:
Las comunicaciones arrendadas también proveen un medio para satisfacer las necesidades de comunicación de las aplicaciones ITS rurales donde la instalación de nuevas líneas de comunicación puede ser demasiado cara.
Highways England (una compañía gubernamental) estableció una asociación público privada para mejorar, opearr y mantener los sistemas de comunicaciones que enlazan los dispositivos de comunicación en la carretera (teléfonos de emergencia, CCTV, etc.) a lo largo de las carreteras y otros caminos estratégicos en Inglaterra. Un consorcio de telecomunicaciones fue elegido para un proyecto de 10 años.
El consorcio tiene una responsabilidad completa por los servicios de transmisión de voz, datos y video que enlazan los dispositivos de campo de la Agencia de las Autopistas con las oficinas de control. Los dispositivos de campo y las aplicaciones del centro de control son propiedad de la agencia. El consorcio es responsable del monitoreo de la performance de los servicios de transmisión, por la prestación de un servicio resiliente y confiable y por la provisión de conexiones locales adicionales para soportar a los dispositivos de campo adicionales.
Las telecomuincaciones por cable o cableadas usan cables de cobre o de fibra óptica para conectar el equipamiento de campo a los centros de control. Típicamente, estos cables se tienden en ductos a lo largo de la carretera con el equipamiento necesario de transmisión de datos instalado en gabinetes a la vera del camino. Los centros de control están estratégicamente localizados en edificios con conexiones cableadas a la red principal.
Las comunicaciones cableadas incluyen una amplio rango de tecnologías que varían en rendimiento, costo y ancho de banda - significando que el volumen de datos que son capaces de comunicar es variable. En un extremo del espectro está la tecnología de fibra óptica que provee el mayor ancho de banda para cualquier sistema de comunicaciones existente actualmente. En el otro extremo están las, pasada de moda, líneas telefónicas con un limitado ancho de banda para la transferencia de datos.
Un cable de fibra óptica es un medio de comunicaciones para ondas de luz para transportar una señal que transfiere información desde un punto a otro. El cable es muy delgado ( ligeramente más delgado que un cabello humano) Para las operaciones, un transmisor óptico es necesario en un extremo del cable y un receptor en el otro – para convertir las señales eléctricas en señales de luz.
La tecnología actual de fibras ópticas es capaz de transmitir cerca de 1,5 Gbits de información por segundo.
Otra ventaja de la comunicación por fibra óptica es que no es susceptible de interferencia magnétoca o resistencia eléctrica, dado que usa ondas de luz. Como desventaja, se tiene que las comunicaciones por fibra óptica son relativamente caras, aunque su amplio uso, hoy en día, ha hecho que se vuelvan más accesibles. Una gran porción de los costos de la tecnología de fibra óptica tiene que ver con la compra de los derechos de paso, el equipamiento de los extremos (convirtiendo los pulsos eléctricos en luz y viceversa) – y la zanja, cañerías y tendidos necesarios.
Un número de agencias de transporte por autopista han librado acuerdos con compañías de telecomunicaciones:
El cable de fibra óptica es usado comúnmente en ITS para aplicaciones donde grandes cantidades de datos son transmitidos. Un buen ejemplo es la conexión entre el Centro de Gestión del Transporte (TMC) y los dispositivos de campo tales como las videocámaras. Existe un interés emergente en que los cables de fibra óptica se conecten directamente a los dispositivos finales – por lo que el equipamiento de campo debe ser especificado con una entrada o toma para fibra óptica. Los cables de fibra óptica son caros y difíciles de reparar cuando se han dañado.
El cableado de cobre es bueno para la transmisión de voz y datos – pero, está en aumento,la necesidad de que los sistemas de cable transporten señales de gran ancho de banda asociadas con imágenes de video de CCTV y otros. Las fibras ópticas están rápidamente reemplzando al cobre en las telecomunicaciones de la línea principal – pero la distribución dentro de los edificios y sobre la "última milla" frecuentemente depende de los cables de cobre coaxiales. El cableado de cobre requiere el uso de amplificadores de línea para cubrir distancias – con un mayor riesgo de ruido en las señales de gran ancho de banda. Con la propagación de la señalización digital y la ADSL (ver abajo) los cables de cobre existentes están cobrando nueva vida para proveer capas de distribución y acceso.
El par de alambres trenzados (TWP) es, entre otros, el más común medio de comunicación para las aplicaciones ITS. Está conformado de dos conductores de cobre aislados trenzados juntos para evitar cualquier interferencia elctromagnética. Avances recientes han permitido el uso de redes Ethernet con TWP en un número de aplicaciones ITS.
Los pares de alambre trenzados representan la opción más compunmente usada para las comunicaciones ITS en las capas de distribución y acceso – especialmente, desde los avances recientes en la tecnología ADSL, permiten el uso de Ethernet sobre TWP. Ésto abre también oportunidades para la utilización de la infraestructura TWP heredada. La ADSL es actualmente usada ampliamente – continuando con la práctica de las compñías de telecomunicaciones – para obtener un mejor uso de sus extensas redes de cable de cobre existentes.
El cable Ethernet es utilizado para crear Redes de Área Local (LAN) proveyendo un red física de datos – conectando conjunto de dispositivos dentro de un centro de control. Transporta datos usando el protocolo Ethernet el cual es casi exclusivamente usado para aplicaciones ICT en edificios /oficinas. El estándar industrial más comúnmente utilizado actualmente es la Categoría 5 (CAT5), el cual contiene cuatro pares de almabre de cobre y soporta velocidades de hasta 100 Mbits/segundo. Estándares más recientes permiten actualmente velocidades mayores hasta 1000 Mbits/segundo. El cable CAT5 está limitado a una longitud máxima recomendada de solamente 328 pies.
Un interesante desarrollo de ITS en los años recientes es el concepto de "Power over Ethernet" (PoE), el cual permite que un simple cable provea tanto la conexión de datos como la alimentación eléctrica a los dispositivos ITS. El PoE permite longitudes de cable mayores.
Además de la necesidad de un red Ethernet dentro de un TMC, los cables Ethernet son comúnmente usados en ITS para formar la capa de acceso para conectar un dispositivo de campo (tal como una videocámara CCTV) a un red o a un punto de acceso de Internet. En este caso, los cables son, principalmente, interconexiones locales de los dispositivos.
Los avances en la tecnología digital en las últimos dos o tres décadas han hecho de las telecomunicaciones inalámbricas una opción atractiva para los ITS viales, in situaciones tales como el control de VMS´s, contadores de estacionamiento, comunicaciones de señales de tránsito, monitoreo remoto y CCTV. Aplicaciones ITS especiales también dependen de una variedad de servicios inalámbricos de radio para comunicación, principalmente:
Estandarización de las Comunicaciones Inalámbricas para ITS en Europa
En Europa los esfuerzos para estandarizar las comunicaciones inalámbricas para ITS están dirigidas hacia la creación de una interface aérea contínua de medio y largo alcance usando una variedad de medios de comunicación, incluyendo el celular, 5 GHz, microndas de 63 GHz y enlaces infrarrojos. La iniciativa es conocida como CALM – el cual soporta una Contínua Interface Aérea de Mediano y Largo Alcance (Continuous Air-interface Long and Medium (CALM)). CALM proveerá la plataforma de comunicación para una rango de aplicaciones, incluyendo tanto seguridad e información vehicular como también entretenimiento para el conductr y pasajeros.
Algunos de los medios de comunicación inalámbrica más comunes que son usados por ITS incluyen:
La comunicación por microondas Punto a Punto usa transmisores y receptores terrestres, semejantes a las antenas parbólicas, para proveer enlaces dedicados de transporte donde las líneas fijas serían impracticables o con costos prohibitivos, para conectar redes de campo a un centro de control. Usualmente, se utiliza en el rango bajo de gigahertz y se limita a una línea de visión. Estaciones repetidoras pueden estar espaciadas a intervalos de, aproximadamente, 48 km para cubrir mayores distancias.
Wi-Fi se ha vuelto una muy popular tecnología para intercambio de datos en forma inalámbrica usando ondas de radio sobre una red informática. Wi-Fi puede soportar aplicaciones ITS no críticas para evitar demoras – pero no otorgan una garantía de ancho de banda. Wi-Fi opera usando frecuencias no licenciadas – por lo que es más susceptible a interferencias. La tecnología tiene potencial para uso en ITS como un medio para conectar dispositivos de campo a un Centro de Control de Tránsito – por ejemplo, donde una solución de comunicaciones por cable sería demasiado cara. En este caso, se debería proveer una conexión segura de Wi-Fi, tal como una red WiFi Mesh, mostrada en la figura siguiente. Ésta muestra una red multipunto WiFi Mesh adecuada para VMS, contadores de estacionamiento, señales de tránsito, monitoreo remoto y videocámaras CCTV ( pero no de fiscalización).
Wi-Fi está basada en el Estándar 802.11 del Instituto de Ingenieros Electricistas y Electrónicos (Institute of Electrical and Electronics Engineers’ (IEEE) (IEEE) Standard 802.11.) Está diseñado para proveer un acceso a la red local para relativamente distancias cortas (entre 50 -100 metros) con velocidades de hasta 54 Mbits/segundo.
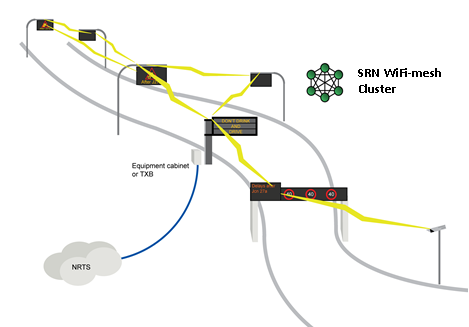
Figure 6 Diagram of a wifi-mesh network suitable for highway data transmission
(Figura cortesía de Barry Moore)
La tecnología Bluetooth también soporta intercambio de datos en distancias cortas. Usa ondas de radio de longitud de onda pequeña y utra alta frecuencia (UHF). Las tecnologías Bluetooth son utilizadas en muchas y diferentes aplicaciones tales como los teléfonos inteligentes, tabletas y computadoras portátiles. Recientemente, se ha ido incrementando el interés de su uso de dispositivos Bluetooth en modo "descubrible" tanto en edificios como en equipamiento embarcado en vehículos para seguir o monitorear al tránsito. Estas aplicaciones usan a los detectores Bluetooth de campo para descubrir a otros dispositivos Bluetooth embarcados en los vehículos y detectar su identificación individual. A través del seguimiento del mismo identificador, al pasar por diferentes puntos de localización, se pueden determinar importantes parámetros del tránsito, tales como tiempo de viajem velocidad, origen y destino del vehículo.
Otro grupo de tecnologías de comunicaciones ampliamente usado en ITS lo representan las comunicaciones dedicadas de corto alcance (DSRC). DSRC fue desarrollada específicamente para las comunicaciones vehiculares y es probable que sufra un dramático incremento en su uso con la introducción de las tecnologías Vehiculo Conectado. Las tecnologías son usadas en un gran número de aplicaciones ITS incluyendo:
En USA, las DSRC generalmente, ser refieren a las comunicaciones dedicadas con una banda de frecuencia de 5,9GHz reseervada específicamente para protocolos de Acceso Inalámbrico en Ambientes Vehiculares WAVE (Wireless Access in Vehicular Environment (WAVE) – definidos en el estándar 1609 de la IEEE y sus partes subsidiarias. Estos protocolos están basados en el ampliamente usado estándar 802.11 de la IEEE para redes inalámbricas Wi-Fi.
Varias tecnologías DSRC son usadas en transporte. Éstas incluyen:
Los tags pasivos no tienen una batería interna. En cambio, usan una muy pequeña corriente eléctrica inducida en la antena cuando llega una señal de re radio frecuencia para transmitir una respuesta. Por esta razón, la antena debe ser diseñada no sólo para recolectar alimentación desde una señal entrante sino que también debe transmitir una señal de salida de retrodispersión. La principal ventaja de los tags pasivos de microondas es que pueden ser pequeños y una vida ilimitada. Las microndas pasivas fueron usadas en ITS en los primeros tipos de sistemas de pago electrónico de peaje. Continúan las innovaciones para su uso.
Los tags activos tienen su propia fuente interna de alimentación eléctrica la cual puede generar una señal de salida. Comparados con los tags pasivos, pueden tener un mayor alcance y pueden almacenar información adicional enviada a través del transductor. Las microondas activas son empleadas eb nuchos sistemas de recolección de pago electrónico de peaje. Las unidades embarcadas son más caras y tienen baterías las cuales necesitan ser reemplazadas.
La tecnología infrarroja DSRC usa la tecnología infrarroja, en oposición a la del espectro de radio o de microondas, para comunicaciones de corto alcance. La DSRC infrarroja puede ser usada en ITS donde es difícil obtener una licencia del espectro de frecuencias. La tecnología es también apropiada cuando el clima es, generalmente, lluvioso – pero no brumoso. La DSRC infrarroja es menos susceptible de detener interferencias.
Bluetooth es una tecnología inalámbrica diseñada para permitir intercambio de datos en cortas distancias (un máximo de cerca de 10 metros). La mayoría de los teléfonos celulares en el mercado actualmente tienen tecnología Bluetooth. También tienen tecnología inalámbrica Wi-Fi, la cual usa ondas de radio para conexiones distantes a una estación base Wi-Fi de hasta 90 metros. En los años recientes, varios fabricantes automotrices han instalado la tecnología Bluetooth en sus vehículos para permitir a los conductores conectar sus teléfonos o dispositvos de música a los sistemas de audio embarcados.
Cuando están activados, los transductores Bluetooth y Wi-Fi difunden continuamente mensajes de "descubrimiento" para permitir a otros dispositivos encontrarse y conectarse con ellos. Los mensajes de descubrimiento incluyen un único identificador que puede ser usado para la detección vehicular y seguimiento. Esencialmente, todo lo que es necesario es un sensor Bluetooth o Wi-Fi instalado cerca del camino. Estos sensores registran el tiempo al cual el vehículo equipado con un dispositivo embarcado Bluetooth o Wi-Fi pasa cerca de ellos. Por medio de la utilización de identificadores únicos se registran los puntos monitoreados y la información sobre los tiempos de viaje a lo largo de un segmento vial - o una matriz de flujos de Origen- Destino a través de una red - puede ser derivada.
El uso de Bluetooth o Wi-Fi es ideal para las redes sociales pero los resultados tienen que ser analizados dado que:
no todos los vehículos reportan un identificador – dado que algunos no estarán equipados con la tecnología o el equipamiento está apagado, en ambos casos el conteo no es registrado.
o un simple vehículo puede tener varios dispositivos activos – conduciendo a múltiples conteos.
Cuando se usa la técnica de muestreo vehicular una desafío clave es asegurar que una proporción suficientemente alta de vehículos están equipados con dispositivos Bluetooth y Wi-Fi. En áreas urbanas ésto puede no ser un gran problema pero en otras regiones la baja penetración en el mercado puede limitar su aplicación de estas tecnologías de detección.
Las comunicaciones en un área amplia son, frecuentemente, requeridas en red para las operaciones - particularmente en áreas rurales donde las opciones para comunicaciones de voz, datos e imágenes de video CCTV son más limitadas.
WiMax representa a la Interoperabilidad Mundial para Acceso por Microondas (Worldwide Interoperability for Microwave Access). WiMax está diseñada para proveer un ancho de anda mucho más grande, comparado con Wi-Fi, y con un mucho mayor alcance. En los años recientes, se ha visto un creciente interés desde la industria ITS en la integración entre WiMax y Wi-Fi como un medio de comunicaciones alternativo a las comunicaciones por cable.
Bajo condiciones ideales, WiMax podría tener un alcamce de más de 40 kilómetros y ofrecer velocidades de hasta 70 Mbits/segundos. Se implementa con el estándar IEEE 802.16, con nuevos estándares diseñado para velocidades de hasta 1 Gbits/segundo. Una red típica WiMax consistiría en una estación base conectada con varios clientes (equipamiento con premisas de clientes o CPE).
Las redes celulares fueron establecidas principalmente para comunicaciones de voz, pero hay un continuo y creciente interés en su uso, también, para comunicaciones de datos. Dos tecnologías celulares de comunicaciones han evolucionado:
.- Sistema Global para Móviles (GSM)
.- Acceso Múltiple por División de Código o Multiplexación por División de Código (CDMA)
Ellas difieren en la manera de transferir datos. GSM divide la banda de frecuencia en múltiples canales para el uso de diferentes clientes. CDMA digitaliza las llamadas y las envía al cliente final. Ambas, GSM y CDMA han sido mejoradas en estos años para permitir una velocidad mayor. Por ejemplo, GPRS (para comunicaciones de paquetes de datos) usa la red celular a velocidades adecuadas para la transmisión de comandos a VMS y a contadores en cocheras de estacionamiento.
La última tecnología celular de datos es la llamada Evolución a Largo Plazo (Long Term Evolution (LTE)), (también conocida como 4G LTE). A diferencia de la GSM y la CDMA, LTE es diseñada principalmente para comunicaciones de datos. Ofrece alto ancho de banda, baja latencia y soportes de proporciones de datos completas mientras viajan a altas velocidades (una característica que es importante en el ambiente ITS con vehículos en rápido movimiento). Las comunicaciones celulares de datos pueden ser usadas en ITS donde las comunicaciones inalámbricas no están disponibles o son muy costosas.
Los Datos Digitales por Radio (DRT) refieren a la práctica de transmisión de datos comprimidos y digitalizados sobre radio FM. Ésto permite que pequeñas cantidades de información digital sean embebidas en la emisión de las convencionales comunicaciones de radio FM. Un buen ejemplo de una aplicación DRT en ITS es el Canal de Mensajes de Tránsito con el Sistema de Datos por Radio (RDS-TMC), donde la información del tránsito codificada digitalmente está disponible para la navegación con los dispositivos embarcados en los vehículos. RDS-TMC es una forma primitiva de la transmisión digital de datos. Fue desarrollada en Europa para explotar el Sistema de Datos por Radio usado por las algunas autoridades de difusión. La información de viaje es transmitida digitalmente en radiofrecuencias FM – y un decodificador, instalado dentro de la radio o del dispositivo de navegación del automóvil interpreta el código digital para las pantallas gráficas o alfanuméricas.
La radio de amplio espectro (Spread spectrum radio) es una red de radio que tiene un requisito “línea de visión” (línea desobstruída del paso entre un sujeto y un objeto). En esta red, una radio sirve como maestro y la otra como esclavo. Un ejemplo del uso de la radio de amplio espectro en ITS es la conexión entre un conjunto de controladores de tránsito en intersecciones señalizadas y el Centro de Gestión de Tránsito (TMC) necesario para los objetivos de monitoreo y sincronización de señales.
En algunos casos, no sería posible enlazar directamente las dos radios debido a la distancia o a la interferencia – en cuyo caso otra radio (llamada repetidor) necesitaría ser instalada entre las dos radios. Estas redes son comúnmente usadas para permitir que un número de controladores de tránsito se comuniquen con otro o se comunique con el centro de operaciones de tránsito. Ellos pueden emitir bajo frecuencias no licenciadas de 900MHz, 2.4 GHz y 5.8 GHz. La frecuencia de 5.8 GHz provee el mayor ancho de banda, aproximadamente de 54 Mbits/segundo, pero es muy susceptible de tener problemas de línea de visión.
Mientras teóricamente, la radio de amplio espectro puede proveer un alcance de comunicación de hasta 60 millas, en la práctica, el rango es mucho más corto debido a la atenuación u obstrucción de la línea de visión.
Una serie de estrategias de control de tránsito puede ser implementada en las Operaciones de las Redes Viales con el objeto de mejorar el flujo de tránsito, prevenir la congestión y mejorar la performance. El software ITS – soportado por una gran cantidad de datos en tiempo real permite saber con precisión el estado de la red vial – es usado para desarrollar una óptima gestión y estrategias de control que soportan a los objetivos de las políticas de la red. Éstos varían de un lugar a otro, pero comúnmente incluyen la maximización del rendimiento del tránsito, la minimización de las demoras y la congestión, el mantenimiento de la seguridad vial para todos los usuarios del camino – incluyendo los cruces seguros para peatones y ciclistas – los objetivos del medioambiente (para reducir los niveles de ruido y/o polución del aire) y la prioridad de señales para autobuses / tranvías para algunos lugares.
Los métodos de control incluyen:
Control de Tránsito Urbano (UTC), con:
Sistemas de Control de Autopistas, incluyendo:
Los controladores de campo son necesarios para implementar estas estrategias. Representan el cerebro del sistema local y proveen los medios para acceder, monitorear y controlar al equipamiento de campo (tal como un medidor en rampas, una señal de tránsito o un detector de vehículos).
El software informático es necesario para proveer estas funciones. Algunas de las funciones que el software del sistema ITS deben realizar incluyen el control de tránsito urbano, el control de tránsito en carreteras arteriales y los sistemas de control de autopistas. .
El control del tránsito urbano se refiere a un paquete de tecnologías dirigidas a la gestión y al control del flujo vehicular en redes urbanas – para minimizar las demoras, maximizar la eficiencia, mejorar la seguridad vial y reducir las emisiones y el consumo de combustible. Una gran parte del control de tránsito urbano involucra software para optimizar los planes de señales en intersecciones para alcanzar esos objetivos. Ésto requiere redes extensa de sensores para recolectar infomación del tránsito en tiempo real – por ejemplo, espiras detectoras, videocámaras de circuito cerrado de TV y procesamiento de imágenes de video, o detectores no intrusivos de tránsito. Basados en la información recolectada, los algoritmos inteligentes logran optimizar los planes de tránsito. Diferentes niveles de control y sofisticación son encontrados en los sistemas de control de tránsito urbano. (Ver Control del Tránsito Urbano).
Varios tipos de controladores de campo están disponibles para responder a las demandas del tránsito, facilitar la movilidad y permitir los tiempos de cruce de calles. En USA el controlador tipo 170 fue desarrollado a comienzos de los año 1970 por el Departamento de Transporte de California. Su sucesor – el tipo 2070 – fue introducido en 1992. Ejemplos más recientes son los controladores de señales NEMA y el Controlador Avanzado de Tránsito (ATC – 2005) – el controlador más avanzado en USA.
Los controladores de tránsito trabajan sobre la base de un ciclo de tiempo que es desagregado en "fases" – el orden en el cual cada corriente vehicular está en verde mientras el otro tránsito vehicular permaneces en rojo. Una simple intersección en una calle debe tener sólo dos fases: Norte/Sur y Este/Oeste. Una intersección congestionada de cuatro manos, con grandes volúmenes de tránsito cambiantes, debería tener hasta ocho fases - una fase por cada una de las cuatro direcciones de tránsito y una fase por cada movimiento cambiante.
En el Reino Unido, un relativamente nuevo controlador denominado Microprocessor Optimised Vehicle Actuation (MOVA) fue desarrollado para superar algunas de las limitaciones asociadas con el tradicional control Vehicle Actuation (VA). Una singular característica del MOVA es que tiene dos modos de operación – una para las condiciones del tránsito congestionado y una para el descongestionado o condiciones de flujo libre.´Para las condiciones de flujo libre, el objetivo del MOVA es controlar cualquier cola que se ha acumulado durante la fase de rojo. Un algoritmo evalúa las cargas de tránsito desde diferentes enfoques de intersecciones y determina si la extensión del tiempo de verde es beneficioso. Si lo es, la fase verde es extendida para dejar circular al tránsito. Ésto continúa hasta que el controlador cambia a una fase diferente. Durante la congestión, el objetivo operacional del MOVA cambian para maximizar la capacidad o rendimiento de la intersección completa.
Los sistemas de control en autopistas se focalizan en obtener una mejor gestión de los segmentos viales para mejorar la capacidad e incrementar la performance. A través de los años, os Sistemas de Ayuda a las Decisiones (DSS) han sido propuestos y desarrollados para ayudar este proceso. Estos DSS pueden proveer recomendaciones para los operadores de tránsito sobre posibles estrategias de control del tránsito – tales como el guiado dinámico de ruta, la medición en rampas, los límites variables de velocidad y la sincronización óptimas de las señales.
Los sistemas de control automatizados de autopistas (algunas veces se los denomina como Gestión Activa de Tránsito o sistemas ATM), usan diferentes conceptos para alcanzar su objetivo – tal como la armonización de la velocidad, el uso temporario de las banquinas, el ruteo y la señalización dinámicas, el control en intersecciones y la medición en rampas. (Ver Gestión del Tránsito en Autopistas).
La Gestión del Tránsito Activo ha sido implementada en Europa, convirténdose en una herramienta para la gestión de la congestión (recurrente o no recurrente), como así también en USA. Los componentes tecnológicos principales de un ATM son similares a los de los sistemas UTC e incluyen sistemas de monitoreo y sensado, comunicaciones, controladores y algoritmos inteligentes.
Los beneficios del sistema ATM incluyen:
Los sistemas de Control de Tránsito Urbano (UTC) requieren señales de tránsito, controladores de señal, medición en rampas y carteles de mensajes variables (Variable Message Signs – VMS) para controlar el tránsito. También se requiere:
Diferentes enfoques y medidas son utilizadas para la gestión y el control en tiempo real en áreas urbanas:
Los sistemas computarizados de control de señales computarizada aparecén en la década de 1960 cuando las computadoras fueron las primeras usadas para coordinar los controladores de señales vehoculares para un grupo de intersecciones – pero sin el beneficio de la actual realimentación de la información desde los detectores de campo a las computadoras. En este tipo de sistema ( conocido como control de lazo abierto) los planes de tránsito que son implementados no responden a la demanda del tránsito real. En cambio, los planes son desarrollados "fuera de líenea" usando datso de los conteos históricos del tránsito – e implementados de acuerdo a la hora del día y el día de la semana.
Este sistema es bastante básico, pero aún ofrece varias ventajas, a saber:
El siguiente nivel de sofisticación es el que corresponde a los sistemas de control de señales donde la informacióon desde los detectores vehiculares de campo es realimentada al computador central. La computadora usa la información de las condiciones actuales del tránsito para elegir el plan de señales a ser implementado (control de lazo cerrado). La selección de planes se realiza de acuerdo a uno de los siguientes métodos:
En este caso, el sistema ha accedido a la base de datos (librería) que acumula un gran número de diferentes patrones de tránsito junto con los planes ´de tránsito "óptimos" (desarrollados fuera de línea) para cada patrón de tránsito. Basado en la información recibida desde los detectores de tránsito , la computadora armoniza el patrón de tránsito observado con los patrones almacenados, para identificar el patrón más parecido. El plan "óptimo" asociado con el patrón identificado es entonces implementado. Este tipo de sistema de control adaptativo de tránsito es, frecuentemente, conocido como un sistema de Primera Generación. Su característica distintiva es que los planes, mientras responden a las condiciones de tránsito, son aún desarrollados fuera de línea. Los sistema de Primera Generación trabajan sobre la base de los datos de tránsito actuales y, generalmente, no tienen capacidades de predicción del tránsito.
En este método, el plan de señales "óptimo" es computado e implementado en tiempo real. La sincronización óptima de señales se comutan en tiempo rel usando los datos actuales de las condiciones del tránsito obtenidas desde la información del detector. Ésto requiere un potencia informática suficiente para realizar las acciones informáticas necesarias en tiempo real. También, se necesitan suficientes datos desde los detectores vehoculares para hacer los cálculos. Los sistemas que desarrollan planes "en red" (en tiempo real) están clasificados como sistemas de Segunda o Tercera Generación. Típicamente, tienen una frecuencia de actualización del plan mucho más corta comparada con los sistemas de Primera Generación; tipícamente, cada 5 minutos para sistemas de Segunda Generación y de 3 a 5 minutos por sistemas de Tercera Generación. Además, algunos sistemas de Tercera Generación utilizan la información de los detectores de tránsito para alimentar algoritmos de diagnóstico de tránsito a corto plazo.
Existen varios ejemplos de sistemas de control adaptativo del tránsito que están en uso alrededor del miundo. Entre los algoritmos más aceptados se encuentran: SCOOT, SCATS y RHODES.
SCOOT (Split, Cycle, Offset Optimisation Technique) es un sistema de control adaptativo del tránsito desarrollado por el Laboratorio de Investigación de Transporte del Reino Unido (United Kingdom’s Transport Research Laboratory (TRL)) a comienzos de los años 1980. SCOOT opera intentando minimizar un índice de performance (PI) – típicamente, la suma de la longitud promedio de colas y el número de paradas a través de la red de controladores. Con el objeto de hacer ésto, SCOOT modifica la longitud del ciclo, la duración del tiempo de verde dado a cada fase de la señal (conocida como tiempo “splits”), y el tiempo "offset" para cada grupo de señales (la diferencia de tiempo entre los tiempos de comienzo del ciclo en las señales adyacentes). SCOOT realiza estos cálculos en tiempor real en respuesta a la información provista por los detectores vehiculares.
La operación de SCOOT está basada en los llamdaos Cyclic Flow Profiles (CFP). Ése presentan como histogramas (representaciones gráficas en rangos especificados por el usuario) que muestran la variación en el flujo de tránsito en un ciclo – el cual es medido mediante lazos y detectores que se ubican a mitad de cuadra de cruces significativos de la red. Usando los CFPs, el optimizador del offset calcula las colas en la línea de parada. Los splits y longitud de ciclo óptimos son, entonces, calculados.
Varias características adicionales se han agregado al SCOOT para mejorar su efectividad y flexibilidad, incluyendo la habilidad para:
El Sistema de Tránsito Adaptativo Coordinado de Sydney (Sydney Co-ordinated Adaptive Traffic System (SCATS)) fue desarrollado a finales de los años 1970 por las Autoridades Viales de tránsito y Carreteras de New South Wales en Australia. Para la operación, SCATS sólo requiere la detección de tránsito en la línea de detención sin necesidad de detectar el tránsito a mitad de cuadra como es necesario en el SCOOT. Ésto simplifica la instalación dado que la mayoría de los sistemas existentes de señales están equipados con sensores solamente en los cruces. SCATS es un sistema jerárquico de inteligencia distribuida que optimiza la longitud de ciclo, los intervalos de fase (splits), y los offsets en respuesta a los volúmenes a ser detectados. Par el control, la red de señales es dividida en un gran número de subsistemas más pequeños, cada uno atendiendo desde una a diez intersecciones. Los subsistemas funcionan individualmente excepto que las condiciones de tránsito requieran el “enlace” – o la integración de los sistemas individuales.
Desde 1991, la Universidad de Arizona ha estado desarrollando un sistema de control adaptativo en tiempo real, llamado RHODES (Sistema Eficaz Distribuido Jerárquico en Tiempo Real - Real-time Hierarchical Distributed Effective System). RHODES es diseñado para tomar ventaja de las variaciones estocásticas (random) naturales en el flujo vehicular, para mejorar la performance – una característica que no se encuentra en los sistemas SCOOT y SCATS.
El sistema RHODES consiste en una jeraquía de tres niveles que desagrega el problema del control del tránsito en tres componentes: carga de la red, control del flujo vehicular y control de la intersección:
El nivel 3 se ocupa del control de la intersección - determinando el tiempo óptimo para cambiar las señales de tránsito para la siguiente secuencia de fase y si la fase actual debería ser acortada o extendida. El marco de tiempo para el control del nivel 3 está, típicamente, en el orden de segundos o minutos.
Donde haya rutas alternativas disponibles, se puede abordar matemáticamente el problema de optimización del tránsito de la red. Para el guiado dinámico de enrutamiento (o de redireccionamiento en rutas) (DRG), la "función objetivo" (una ecuación que expresa la función operacional que necesita ser maximizada o minimizada) – es la medición de la performance de la red de autopistas, a ser optimizada. Por ejemplo, el objetivo debería ser minimizar el tiempo total de viaje de todos los vehículos. Las variables de decisión son las proporciones del tránsito que se dividen en cada punto de desviación – para optimizar la performance de la red. La división del tránsito define cómo el tránsito debería ser distribuido. La meta es modelizar el flujo vehicular en la región y asegurar que se mantenga en los nodos y a lo largo de los enlaces de la red, sin la congestión establecida. El software ITS puede, entonces, ser utilizado para resolver el problema de optimización de la función objetivo y para recomendar una estrategia de redireccionamiento que variará en tiempo real de acuerdo a las condiciones del tránsito. El consejo de direccionamiento será dado a través de la difusión de información del tránsito, o bien en VMS o mediante guiado embarcado de rutas para aquellos vehículos que estén equipados con dicho equipamiento.
La prioridad del transporte público (conocida como Transit Signal Priority o TSP en USA) es una medida que tiene como meta la reducción de las demoras para los vehículos del transporte público (autobuses, tranvías, taxis) en intersecciones semaforizadas, dando a sus movimientos un trato preferencial. Los métodos para realizar esta acción pueden ser divididas en estrategias pasivas i activas. La diferencia básica estriba en las características de los sensores y detectores especializados que son utilizados para detectar a los vehículos del transporte público que se aproximan.
Las tecnologias de soporte para identificar específicamente a estos tipos de sensores son: la tecnología pasiva TSP, que simplemente mejora las condiciones para todos los vehículos a lo largo del corredor del transporte público.
Y las tecnologías activas que detectan la aproximanción de autobuses o tranvías (ésto es típicamente un conjunto de un transmisor en el vehículo que se comunica con un receptor o detector instalado en un controlador al costado de la carretera). Se dispone de diferentes algoritmos o estrategias para el funcionamiento de la prioridad activa de autobuses. Entre las más comunes se tienen:
Extensión de Verde: ésto extiende el tiempo de verde si un autobús o un tranvía es detectado, para permitir pasar al vehúclo en forma prioritaria - hasta un cierto y predeterminado límite. Esta estrategia solamente beneficia a una pequeña porción de vehículos, pero la reducción en la demora para los beneficiarios es significativa (igual a la longitud de todo el intervalo en rojo)
Verde Temprano: acorta el tiempo de verde para fases conflictivas, mediante una predefinida cantidad de tiempo – por ejemplo, cuando el autobús llega mientras la señal de tránsito está en su fase de color rojo. El Verde temprano beneficia a un gran porcentaje de autobuses, pero el ahorro por vehículo no es tan grande como con la Extensión de Verde.
Rotación de Fase: bajo esta estrategia, la secuencia del tiempo de verde para diferentes maniobras en la intersección se cambia de modo tal que el vehículo prioritario no se retrase. Una modificación común – que permite al vehículo cruzar a la corriente vehicular opuesta – amerita saltar de una señal dedicada de intercambio desde el comienzo del ciclo (la fase " de avance") al final del ciclo (la fase "de retraso").
Fase de Tránsito Actuada (s): requiere establecer fases de tránsito, las cuales solamente se activen cuando un autobús / tranvía se presente. En este caso, una fase especial de señal de tránsito debería mostrarse; por ejemplo, una letra “B” para Bus o “T” para Tranvía.
Inserción de Fase: ésto permite a la misma fase aparecer más de una vez durante el mismo ciclo con el objeto de servir al vehículo circulante.
Una importante función que el software ITS puede proveer para las Operaciones de Redes de Carreteras es la capacidad de detectar incidentes y condiciones anormales a través de un análisis automático de los datos de supervisión del tránsito en tiempo real. El desarrollo de los algoritmos de Detección Automática de Incidentes (Automatic Incident Detection (AID)) comenzó en los años 1970, y desde ese tiempo muchos algoritmos se han desarrollado. Ellos han tenido un éxito desigual, primeramente debido a su relativamente alta tasa de falsas alarma (medida como una relación entre el número de detecciones falsas y el número total de observaciones).
Los algoritmos AID puede ser ampliamente divididos en cuatro grupos basados en el principio de operación del algoritmo. Estos grupos son:
Estos son los algoritmos AID comúnmente más usados. Ellos están basados en la premisa de que la ocurrencia de un incidente ocasiona un incremento en la densidad del tránsito aguas arriba y un decrecimiento en la densidad del tránsito aguas abajo. El Algoritmo California es uno de los primeros algoritmos AID del tipo comparativo que fueron desarrollados – y es, frecuentemente, usado para comparaciones y benchmarking. Desde que el se desarroll+o el primer algoritmo original California, se han realizado ajustes para su performance. Al menos 10 nuevos algoritmos han sido producidos, de los cuales el 7 y el 8 son los más exitosos. El algoritmo TSC 7 representa un intento para reducir la tasa de falsa alarma del algoritmo original. El algoritmo TSC 8 prueba repetidamente los efectos de la congestión aguas arriba de un probable incidente y monitorea otras características del tránsito.
La Teoría de la Catástrofe deriva su nombre de los cambios repentinos que tienen lugar en una variable que está siendo monitoreada – mientras que variables relacionadas, que también estpan siendo monitoreadas, muestran cambios suaves y continuos. Para la detección de incidentes, los algoritmos de la teoría de la catástrofe monitorean las variables fundamentales del flujo vehicular – velocidad, flujo y ocupación del carril (densidad). Cuando el algoritmo detecta una drástica caída en la velocidad, sin una inmediata cambio correspondiente en la ocupación y en el flujo, ésto es un indicador de que un incidente ha probablemente ocurrido. El algoritmo McMaster desarrollado en la Universidad de McMaster en Cánada es un buen ejemplo de un algoritmo basado en este concepto.
Métodos estadísticos o de serires de tiempos son utilizados para pronosticar estados o condiciones futuras de tránsito. A través de las comparación de datos de tránsito observados en tiempo real con datos pronósticos, los cambios inesperados son clasificados como incidentes. Un ejemplo de este tipo de algoritmos, es el algoritmo de series de tiempos, llamado Auto-Regressive Integrated Moving-Average (ARIMA). ARIMA es utilizado para proveer pronósticos de ocupaciones de tránsito a corto plazo basados en datos observados de tres intervalos de tiempo previos. El algoritmo también calcula con el intervalo de confiabilidad de 95%. Si las observaciones fallan fuera del rango del 95% como predice el modelo, se asume que ha ocurrido un incidente.
Varios conceptos de Inteligencia Artificial (AI) han sido aplicados a problemas en la ingeniería y en la planificación del transporte. La detección automática de incidentes es una aplicación. La detección de incidentes es un buen ejemplo de un grupo de problemas conocidos como problemas de clasificación o de reconocimiento de patrones - para los cuales las teorías son bastante efectivas para encontrar una solución. Entre los conceptos más aplicados al problema de la detección de incidentes está el llamado Artificial Neural Networks (ANNs). Este usa algoritmos complejos y múltiples procesadores computarizados para reconocer patrones y conexiones en los datos de entrada.
En los últimos años los fabricantes automotrices han ido introduciendo tecnologías sofisticadas de control vehocular para mejorar la seguridad, la eficiencia en el consumo de combustible y el nivel de confort de los conductores, entre otras cosas. Estas nuevas tecnologías son, a veces, llamadas Sistemas Avanzados de Asistencia al Conductor (Advanced Driver Assistance Systems (ADAS)). Estos sistemas usan la tecnología de los sensores, tales como el radar automotriz que ha sido desarrollado específicamente para su uso en automotores. (Ver Sistemas de Control & Advertencia). Ellos tienen un efecto positivo en la seguridad vial y en la gestión del tránsito por medio de la ayuda a los conductores para que mantengan una velocidad y una distancia seguras, para que permanezcan dentro de los carriles y para que eviten maniobras de sobrepaso inseguras. Los beneficios pueden ser ampliados aún más si los vehículos individuales se comunican contínuamente con otros o con la infraestructura vial – los así llamados vehículos "conectados" (Ver Vehículos Conectados).
Ejemplos de control vehicular longitudinal son el Control Adaptativo de Velocidad (Adaptive Cruise Control (ACC)) y el Control de Velocidad Adaptativo y Cooperativo (Co-operative Adaptive Cruise Control (CACC)). El ACC está diseñado de modo tal que el automóvil automáticamente mantiene una dustancia segura con el vehículo que circula adelante, en términos de distancia o de tiempos, como sea programado por el conductor. El conductor especifica la velocidad máxima ( como con el control de velocidad crucero normal) y la distancia siguiente. Un sensor tipo radar embarcado actúa con un vehículo adelante y el sistema de control del vehículo mantiene la distancia especificada. El ACC es, a menudo, acompañado con un sistema de alerta de coisión frontal que avisa al conductor en el caso de que una obstrucción peligrosa se encuentre delante suyo. Incluso, se puede comenzar a aplicar los frenos si el conductor falla al hacerlo.
La investigación está tomando lugar combinando el ACC con intercomunicaciones entre vehículos. Con el agregado de las comunicaciones, el ACC se convierte en un CACC. Las comunicaciones permiten que la relación de aceleración y de desaceleración del vehículo de adelante sea comunicada en tiempo real al siguiente vehículo (varias veces por segundo). La ventaja real del CACC es que reduce la demora en el tiempo de respuesta del vehículo que circula detrás.
Alguno de los automóviles nuevos de alta gama que están en el mercado incluyen actualmente sistemas de alerta sobre salida del carril y sistemas de ayuda para mantener el carril. Éstos mantienen un seguimiento de la posición relativa del vehículo al circular por un carril. Usan un conjunto de sensores tales coo sensores de video montados detrás del parabrisas, sensores laser en el frente del vehículo y/o sensores infrarrojos bajo el vehículo. Los sistemas de alerta solamente suenan si el vehículo comienza a desviarse del carril, mientras que los sistemas de ayuda a mentaner el carril pueden tomar una acción para retornar al vehículo a una posición segura dentro del carril.
Combinando tecnologías, la próxima evolución en sistemas de control vehicular son los vehículos autónomos.
La Administración de Seguridad Vail en Autopistas de USA (US National Highway Traffic Safety Administration (NHTSA)) ha definido cinco niveles de automatización, para describir sistemas con distintos grados de autonomía, de la siguiente forma:
El automóvil Google es un ejemplo de qué existe en desarrollo y en prueba en California. youtube (Ver Video)
Las telecomunicaciones móviles digitales están teniendo un profundo efecto en el medioambiente operativo de ITS permietiendo las comunicaciones Vehículo- Vehículo (V2V) y Vehículo - Infraestructura (V2I). SE pueden combinar ambos conceptos refiriéndose sólo a las comunicaciones V2X – significando comunicaciones inalámbricas en red entre vehículos, infraestructura (unidades viales y centros de control de tránsito) y dispositivos de comunicación personal de los pasajeros. Los vehículos pueden difundir datos describiendo su posición, movimientos y maniobras – y compartir éstos con otros vehículos para prevenir colisiones entre ellos y con la infraestructura para optimizar el control del tránsito.
La capacidad para enviar y recibir estos datos permite a los sistemas inteligentes vehiculares integrar la información de los sistemas de navegación con los datos que vienen de los sensores embarcados y con la información recibida desde la infraestructura. Ésto provee a los sistemas vehiculares una conciencia de su entorno inmediato, incluyendo áreas que no son visibles para el conductor – las cuales pueden ser usadas para asistir al conductor para manejar de forma más segura. Si estos sistemas vehiculares anticipan un accidente ellos pueden, como mínimo, avisar a los sistemas de seguridad y, quizás, intervenir para prevenir un siniestro vial.
Las tecnologías necesarias para implementar un medioambiente de Vehículos Conectados y Cooperativos (CV) se componen de cuatro componentes separados:
Los OBE son:
Algunas de las informaciones basadas en el vehículo puede ser obtenida desde un sensor tipo GPS u otro similar (por ejemplo: la localización, velocidad y dirección), mientras que otra información (por ejemplo: aceleración, consumo de combustible instatáneo, activación del sistema antibloqueo de frenado , estado del limpiaparabrisas) puede ser obtenida desde las herramientas de observación del vehículo y de otros sistemas que monitorean los diferentes subsistemas del vehículo.
Los vehículos conectados están instrumentados con ampio rango de tecnologías de sensado que permiten aplicaciones que tienen como objetivo mejorar la seguridad y la eficiencia - incluyendo:
Las unidades y el equipamiento de campo (viales) son sistemas de infraestructura que se comunican con vehículos y recolectan datos desde ellos. El equipamiento de campo puede soportar aplicaciones basadas en la infraestructura o aplicaciones que involucren la cooperación entre vehículos y la infraestructura (tales como los sistema para evitar colisiones, y las eco-señales que informan a los vehículos que se aproximan el tiempo remanente de luz verde para permitir a los conductores ajustar su velocidad). El equipamiento de campo también soporta las aplicaciones remotas para comunicar la información recolectada desde los vehículos hacia una localización central para su procesamiento. Ellos también pueden ayudar a soportar la seguridad y la integridad de los sistemas vehiculares cooperativos.
La red de comunicaciones es la infraestructura necesaria para proveer conectividad entre vehículos (V2V), entre vehículos e infraestructura (V2I), y entre el equipamiento de campo y otras partes del sistema (V2X). Las comunicaciones inalámbricas son requeridas para las comunicaciones V2V y V2I, para las cuales el equipamiento de campo puede usar redes inalámbricas o cableadas.
La Iniciativa Vehículos Conectados – USA
En USA, se han focalizado en el uso de las Comunicaciones Dedicadas de Corto Alcance (Dedicated Short-Range Communications (DSRC)) para los sistemas de vehículos cooperativos. En forma similar al Wi-Fi, DSRC es un protocolo abierto para la comunicación inalámbrica. Ahora bien, la gran diferencia es que la DSRC permite comunicaciones altamente seguras y de alta velocidad – características que son crítuicas para las aplicaciones de seguridad. La DSRC tiene las siguientes características ventajosas:
baja latencia (menor a 0,02 segundos)
solidez ante interferencias
protección dedicada del ancho de banda (dependiendo de los sitios del país considerado)
En USA, durante el año 2004, la Comisión Federal de Comunicaciones (Federal Communications Commission), dedicó 75 MHz de ancho de banda a 5.9 GHz, para ser utilizado ppara la Iniciativa de Vehículos Cooperativos.
El veloz progreso en las telecomunicaciones móviles significó que el vehículo conectado no es más un concepto de investigación sino una realidad. Las aplicaciones del concepto de vehículos conectados se pueden clasificar en cuatro diferentes categorías, aunque no necesariamente separadas:
.- aplicaciones de seguridad - ejemplos incluyen a los consejos a conductores, las alertas a conductores y los controles de vehículos y/o infraestructura (Ver Ayuda al Conductor );
.- aplicaciones de movilidad que usan datos en tiempo real. Los datos son transmitidos a los vehículos en forma inalámbrica y son usados por proveedores de servicios de información para difundir las condiciones del tránsito actual para los sistemas satelitales de navegación. Los datos obtenidos desde los vehículos conectados también tiene valor para las actividades de gestión de la red y para los ingenieros de tránsito para optimizar la performance del sistema de transporte. (Ver Monitoreo por Vehículos Sonda);
.- aplicaciones de medioambiente que usan los datos en tiempo real desde los vehículos para soportar el desarrollo, la operación y el uso de las aplicaciones de "transporte verde" (Ver Visión de Operaciones de una Red Inteligente);
.- aplicaciones comerciales que mejoran los negocios viales y abren nuevas áreas de mercado – tales como los servicios de valor agregado basados en la localización (Ver Servicios Basados en la Localización).
Una revisión de los desarrollos relacionados con los vehículos conectados y las probables consecuencias para las Operaciones de las Redes Viales fue llevada a cabo por un comité especial de la Asociación Mundial de Carreteras (World Road Association (PIARC) Task Force), trabajando en colaboración con la Federación Internacional de Sociedades de Ingeniería Automotriz (International Federation of Automotive Engineering Societies (FISITA)). El informe de dicho equipo fue publicado en el año 2012 y puede ser descargado desde la Biblioteca Virtual de la Asociación Mundial (PIARC Virtual Library) en: http://www.piarc.org/en/order-library/13731-en-The%20connected%20vehicle.htm
Una de las más exitosas aplicaciones de ITS es el pago electrónico. (Ver Pago Electrónico). El pago electrónico sin parar soporta el pago de peaje vehicular sobre la vía. Las tarjetas inteligentes de viaje soportan el pago de viaje para servicios combinados de transporte (autobuses, tren, metro, transporte por río, estacionamiento).
Las aplicaciones de pago electrónico integran tecnologías para comunicaciones, procesamiento de datos, almacenamiento de datos y microcomputación. El proceso comprende actividades “front end” y “back-end”.
Las actividades “Front-end” son las vistas por el usuario. Las tecnologías de hardware “front-end” más comunes son las tarjetas inteligentes, y los transponders (tags, tales como el EZ-pass ampliamente usados para la recolección de pago electrónico de peaje en USA) y – aumentando su presencia – teléfonos inteligentes.
Las actividades “Back-end” son aquellas relacionadas con el procesamiento del pago, mantenimiento decuenta, servicios al cliente e informes.
El pago electrónico es ampliamente usado para la recolección del pago de peaje en estaciones viales mientras el vehículo está en movimiento. Los principales componentes del sistema son: el transponder (también conocido como toll tag), el lector del tag y el sistema informático para el procesamiento de datos. La mayoría de los transponders usan la tecnología de identificación por Radio Frecuencia (Radio Frequency Identification(RFID)). Existen dos tipos de transponders: activos y pasivos. Los transponderes activos poseen su propia fuente de alimentación de energía (baterías), mientras que los transponders pasivos están alimentados por un pulso de radiofrecuencia (RF) que reciben desde el lector. Los transponders pasivos son más económicos pero tienen un rango de comunicación más pequeño y transmiten menos datos. Los nuevos modelos de transponders están diseñados para permitir su integración con tarjetas inteligentes (usando ranuras incorporadas).
Los sistemas de pago electrónico de tarifas son de uso común y ofrecen un gran número de ventajas sobre los métodos de pago tradicionales:
Hay dos tipos básicos de sistemas de pago electrónico de tarifas de peaje: sistemas cerrados y sistemas abiertos.
Los sistemas cerrados están limitados a un propósito principal (tal como el pago de tarifas de transporte) con, quizás, unas pocas aplicaciones adicionales tales como el pago de las cuotas para playas de estacionamiento. El valor del pago almacenado sobre la tarjeta no puede ser usado para otra cosas que para las tareas precargadas o predefinidas.
Los sistemas abiertos pueden ser usados para pagar otras compras además del transporte. Un ejemplo es una tarjeta bancaria de crédito o débito la cual puede ser usada con múltiples comerciantes, pero el pago de tarifas no es una aplicación atractiva para las compañías de tarjetass de crédito porque las transacciones son de gran volumen y bajo valor.
Una tarjeta inteligente es una tarjeta que parece una tarjeta de crédito en forma y dimensaiones., pero tiene un micrprocesador embedido – en efecto, reemplaza la banda magnética en una tarjeta de crédito.
Las tarjetas de crédito facilitan la recolección y la gestión de los pagos usando medios electrónicos en lugar de dinero físico o transferencias en papel. El sistema consiste en dos principales componentes – una tarjeta y un lector de tarjetas. Las tarjetas pueden ser del tipo banda magnética donde el lector hace la mayoría de los procesamientos de datos – o ellos pueden estar equipados con un microprocesador, en cuyo caso, el procesamiento de datos puede tener lugar en la tarjeta misma (ésto es la opción más popular).
Las tarjetas inteligentes pueden proveer identificación, autenticación, almacenamiento de datos y procesamiento de la aplicación. Su uso para pagos electrónicos ofrece al viajero y a la compañía/agencia de transporte varios beneficios – incluyendo ahorro de tiempos, un método de pago más conveniente, la capacidad de implementar estrategias de tarificación más flexibles pero más complejas, menores costos de administración y mejores datos para una planificación futura. También permite estrategias de venta de tickets integrada de modo que el viajero pueda usar una simple tarjeta para pagar por su transporte – vía autobús, tranvía, metro/subterráneo o ferries.
Las tarjetas inteligentes pueden ser de dos tipos: tarjetas inteligentes con o sin contacto:
Un cantidad de otras tecnologías han sido adaptadas para el pago electrónico – incluyendo a los sistemas basados en DSRC/GNSS y los sistemas de reconocimiento de número de placa del automotor.
Estos sistemas han sido usados para los peajes urbanos o para tasa por congestión, basados en las tecnologías de Comunicación Dedicada de Bajo Alcance (Dedicated Short Range Communication (DSRC)). La frecuencia estándar de micronda de 5.8 GHz es usada para la comunicación entre los transponders y las antenas viales y los dispositivos embarcados en los vehiculos.
Los sistemas basados en GNSS usan los sensores del Sistema Satelital de Navegación Global Satelital (Global Navigation Satellite System (GNSS))dentro de los vehículos. Ésto permite implementar un amplio rango de estrategias de tarificación inside the vehicles, incluyendo a las estrategias basadas en las distancias recorridas. Los sensores GNSS graban los datos de tiempos y posición de los vehículos, los cuales entonces son procesados como información del viaje y contrastados con un esquema de tarificación establecido. El procesamiento de los datos puede ser realizado en una sitio central o dentro del vehículo mismo. La primera demostración exitosa de los sistemas de tarificación basados en GNSS tuvo lugar en Alemania sobre la autovía A555 entre Bonn y Colonia.
Con la amplia adopción de los teléfonos inteligentes, una cantidad de aplicaciones han sido desarrolladas donde el teléfono inteligente puede actuar como un dispositivo de pago. Un ejemplo es la aplicación “paybyphone” para pagar peajes y cocheras de playas de estacionamiento. (Ver http://paybyphone.com/how-it-works/).